
技术
▼
热搜:
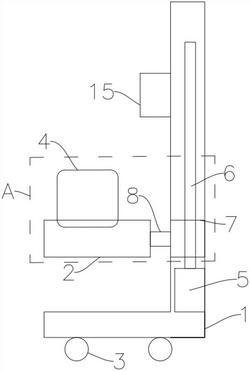
本实用新型提供了一种X射线探伤机升降装置,支撑架上设置有万向轮、升降台和驱动电机,升降台由驱动电机通过丝杠驱动,升降台上设置有伺服电机,伺服电机与传动轴连接,传动轴的另一端与支撑板连接,支撑板上开设有安装槽,安装槽上开设有安装孔,安装孔内设置有拉伸弹簧和限位销,支撑板上还开限位孔,支撑架上还设置有控制装置和电源接头;采用支撑板和限位销的配合,能够将X射线探伤机固定在支撑架上,方便探伤机的安装与拆卸,提高工作效率;采用升降台和驱动电机的配合,便于探伤机在竖直方向上的升降,提高适配性;采用伺服电机和传动轴的配合,能够使探伤机围绕传动轴旋转,便于射线束中心对准被检测区中心,便于检测人员操作。
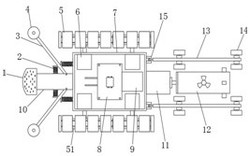
本实用新型公开了一种磁吸附式爬行X射线探伤机器人,本实用新型涉及探伤机器人技术领域,包括机体,所述机体的内部安装有控制器,且控制器的一侧安装有蓄电池,所述机体的内部安装有驱动装置,且驱动装置的一侧安装有链轮,所述链轮上安装有链条,所述机体的一侧安装有安装杆,且安装杆的一端安装有气囊,所述安装杆上对称安装有支撑杆,且支撑杆的端部安装有导轮,所述支撑杆与气囊之间安装有弹簧,本实用新型通过在机体上设置的安装杆,提高探伤机器人的稳定性,有利于探伤机器人持续高效工作,通过在机体顶部设置的安装座,减少探伤机器人的行走路程,降低蓄电池耗电量,提高探伤机器人的工作效率。



































































 陕西 - 西安
陕西 - 西安 2024年06月28日 ~ 30日
2024年06月28日 ~ 30日



