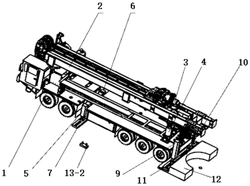
权利要求书: 1.一种车载钻机钻进现场自动找孔系统,包括汽车底盘(1)、设在汽车底盘(1)上的钻机机架(2)和设在钻机机架(2)上的回转器(3),在汽车底盘(1)和钻机机架(2)之间设有斜撑油缸(4),且斜撑油缸(4)靠近汽车底盘(1)和钻机机架(2)后部;所述汽车底盘(1)和钻机机架(2)后端铰接;其特征在于,还包括设在汽车底盘(1)两侧的竖向的前左支腿(5)和前右支腿(6)、设在前左支腿(5)下方的前左平移副(7)、设在前右支腿(6)下方的前右平移副(8)、设在汽车底盘(1)后端的竖向的后左支腿(9)和后右支腿(10)、设在后左支腿(9)和后右支腿(10)下方的后平移副(11)、钻孔定位单元(12)以及电液控制单元(13);所述前左支腿(5)、前右支腿(6)、后左支腿(9)和后右支腿(10)均为竖向油缸伸缩结构;所述后平移副(11)上表面两端设有左测距传感器(14)和右测距传感器(15),上表面中部设有信号发生器(16),后平移副(11)下表面中部设有矩形凹槽(11?6);
所述钻孔定位单元(12)包括钻孔定位板(12?1),钻孔定位板(12?1)一侧设有半圆形缺口(12?2),另一侧为滑动平台(12?3),滑动平台(12?3)厚度小于钻孔定位板(12?1)厚度,滑动平台(12?3)与钻孔定位板(12?1)相接处的钻孔定位板(12?1)的侧壁为垂直侧壁(12?4);
所述后平移副(11)能置于滑动平台(12?3)上且后平移副(11)的长度小于等于滑动平台(12?3)的长度,在滑动平台(12?3)中心设有竖向的弹簧(12?5),弹簧(12?5)上端设有能配合插入所述矩形凹槽(11?6)内的矩形的卡位板(12?6),在靠近垂直侧壁(12?4)的钻孔定位板(12?1)中部设有能与所述信号发生器(16)配合的信号接收器(17);
所述电液控制单元(13)能控制前左支腿(5)、前右支腿(6)、后左支腿(9)和后右支腿(10)分别带动前左平移副(7)、前右平移副(8)以及后平移副(11)竖向伸缩,还能控制前左平移副(7)、前右平移副(8)以及后平移副(11)分别带动前左支腿(5)、前右支腿(6)、后左支腿(9)和后右支腿(10)平移,以及控制左测距传感器(14)、右测距传感器(15)、信号发生器(16)和信号接收器(17)工作。
2.如权利要求1所述的车载钻机钻进现场自动找孔系统,其特征在于,所述前左平移副(7)包括前左平移板(7?1)、前左油缸(7?2)和前左滑块(7?3);所述前左平移板(7?1)上设有滑槽,前左滑块(7?3)和前左油缸(7?2)安装在前左平移板(7?1)上的滑槽内,且前左油缸(7?2)的伸缩杆端部连接所述前左滑块(7?3)以驱动前左滑块(7?3)沿滑槽左右移动;
所述前右平移副(8)包括前右平移板(8?1)、前右油缸(8?2)和前右滑块(8?3);所述前右平移板(8?1)上设有滑槽,前右滑块(8?3)和前右油缸(8?2)安装在前右平移板(8?1)上的滑槽内,且前右油缸(8?2)的伸缩杆端部连接所述前右滑块(8?3)以驱动前右滑块(8?3)沿滑槽左右移动;
所述前左平移板(7?1)上的滑槽和前右平移板(8?1)上的滑槽位于同一直线上;所述前左油缸(7?2)设在前左滑块(7?3)的左侧且前右油缸(8?2)设在前右滑块(8?3)的左侧;
所述前左平移板(7?1)和前右平移板(8?1)之间通过销轴连接。
3.如权利要求2所述的车载钻机钻进现场自动找孔系统,其特征在于,所述后平移副(11)包括后平移板(11?1)、设在后平移板(11?1)上的后左滑块(11?2)和后右滑块(11?3)以及设在后左滑块(11?2)左侧的后左油缸(11?4)和设在后右滑块(11?3)左侧的后右油缸(11?5);
所述后平移板(11?1)上设有滑槽,后左油缸(11?4)和后右油缸(11?5)固定在滑槽内,后左滑块(11?2)和后右滑块(11?3)安装在滑槽内,且后左油缸(11?4)的伸缩杆端部连接后左滑块(11?2)以驱动后左滑块(11?2)在滑槽内移动,后右油缸(11?5)的伸缩杆端部连接后右滑块(11?3)以驱动后右滑块(11?3)在滑槽内移动。
4.如权利要求3所述的车载钻机钻进现场自动找孔系统,其特征在于,所述前左滑块(7?3)、前右滑块(8?3)、后左滑块(11?2)和后右滑块(11?3)上均设有球形槽,前左支腿(5)下端球形端部置于前左滑块(7?3)的球形槽内,前右支腿(6)下端球形端部置于前右滑块(8?3)的球形槽内,后左支腿(9)下端球形端部置于后左滑块(11?2)的球形槽内,后右支腿(10)下端球形端部置于后右滑块(11?3)的球形槽内。
5.如权利要求4所述的车载钻机钻进现场自动找孔系统,其特征在于,所述电液控制单元(13)包括控制器(13?1)、用以远距离操纵控制器(13?1)的遥控器(13?2)、能被控制器(13?1)控制以驱动前左支腿(5)和前右支腿(6)伸缩的支腿前换向阀(13?3)、能被控制器(13?1)控制以驱动后左支腿(9)和后右支腿(10)伸缩的支腿后换向阀(13?4)、能被控制器(13?1)控制以驱动前左油缸(7?2)和前右油缸(8?2)伸缩的平移前换向阀(13?5)、能被控制器(13?1)控制以驱动后左油缸(11?4)和后右油缸(11?5)伸缩的平移后换向阀(13?6)、支腿前单向阀(13?7)、支腿后单向阀(13?8)、平移前单向阀(13?9)和平移后单向阀(13?10)。
6.如权利要求5所述的车载钻机钻进现场自动找孔系统,其特征在于,在钻机机架(2)立起状态下,回转器(3)中心到后平移副(11)后侧壁的垂直距离为X;
钻孔定位板(12?1)的半圆形缺口的圆心到钻孔定位板(12?1)的垂直侧壁(12?4)的垂直距离为Y;且X=Y。
7.如权利要求6所述的车载钻机钻进现场自动找孔系统,其特征在于,所述滑动平台(12?3)上设有滑动衬板(12?7),滑动衬板(12?7)垂直紧贴所述垂直侧壁(12?4);
所述滑动衬板(12?7)和滑动平台(12?3)上设有沉头槽(12?8),在沉头槽(12?8)内安装所述弹簧(12?5);所述半圆形缺口(12?2)位于钻孔定位板(12?1)后边缘的中部。
8.一种车载钻机钻进现场自动找孔的实施方法,其特征在于,该方法通过权利要求7所述的车载钻机钻进现场自动找孔系统进行自动找孔;包括以下步骤:
步骤1,在钻孔位置确定后通过吊车将钻孔定位单元吊放在对应位置以使钻孔定位板的半圆形缺口圆心与钻孔中心重合,车载钻机驶入钻场,根据钻孔位置,采用倒车的方式进行初步定位,后平移副支撑位置落入钻孔定位单元的滑动平台上;
步骤2,遥控器远距离操纵控制器,开启自动找孔系统,控制器调整支腿前换向阀、支腿后换向阀至下位,前左支腿、前右支腿、后左支腿和后右支腿伸出,使前左平移副和前右平移副支撑于地上,后平移副支撑于滑动平台上,并将卡位板压入沉头槽内;
步骤3,左测距传感器和右测距传感器检测后平移副左右两端与垂直侧壁的距离为L1和L2,当L1<L2时,说明钻机整体方位往左偏,控制器控制平移前换向阀至下位,平移后换向阀至中位锁定,前左油缸和前右油缸伸长推动前左滑块和前右滑块,使前左支腿和前右支腿向右移动,后平移副在滑动平台上滑动,车载钻机整体向右摆动;油缸行程S走完后,控制器控制平移前换向阀至上位,支腿前换向阀至上位,前左平移副和前右平移副离开地面,并相对前左支腿和前右支腿运动至初始位置;
步骤4,控制器控制支腿前换向阀至下位,前左平移副和前右平移副再次支撑于地面后,重复步骤3再次推动车载钻机整体向右摆动,直至L1=L2后,停止运动,车载钻机方位摆正;
步骤5,信号接收器接收到信号发生器信号后,判断信号的方位,当信号处于信号接收器右侧时,钻机整体位置偏右,控制器控制平移前换向阀和平移后换向阀至上位,前左油缸、前右油缸、后左油缸、后右油缸同步向左平移,重复步骤3油缸行程S走完后的动作,当信号接收器位置与信号发生器位置重合,停止运动;
步骤6,前左支腿和前右支腿缩回,前左平移副和前右平移副移离地面,去掉前左平移副和前右平移副中间的连接销轴,将前左平移副和前右平移副分别绕前左支腿和前右支腿旋转90°,平移前换向阀至下位,前左油缸和前右油缸伸长推动前左滑块和前右滑块,使前左支腿和前右支腿向钻孔中心运动,后平移副在滑动平台上平移,重复步骤3油缸行程S走完后的动作,当后平移副后侧面与垂直侧壁接触后,或卡位板自动弹出卡入矩形凹槽内,停止运动,车载钻机回转器中心与钻孔中心完成对中,自动找孔完成。
9.如权利要求8所述的车载钻机钻进现场自动找孔的实施方法,其特征在于,步骤3中,若为L1>L2,则车载钻机整体右偏,前左平移副和前右平移副中的油缸运动方向相反,重复步骤3至6实现钻机自动找孔。
说明书: 车载钻机钻进现场自动找孔系统及实施方法技术领域[0001] 本发明属于钻探装备技术领域,具体涉及车载钻机钻进现场自动找孔系统及实施方法。背景技术[0002] 车载钻机主要适用于地面煤层气抽采孔、电缆孔、浅层页岩气钻孔和矿山地面应急救援孔的施工,具有搬迁运输方便,工艺适应性强的优点。[0003] 目前,车载钻机到达钻进现场后,需由司机驾驶钻机底盘移动至指定位置,钻机机架立起后判断动力头中心与钻孔孔位的偏差,然后放下机架,再次移动底盘,重复操作,直至动力头中心与钻孔中心对齐,且车载钻机尺寸较大(不小于13.6m)、整备质量大(50t以上),司机驾驶过程中存在视觉盲区,驾驶难度大,现场找孔时间长、精度低。对于不能一次性成孔的钻孔,需采用多种工艺方法进行分级钻进,各级钻孔同心度的高低对于钻孔质量的好坏有重要影响。目前,车载钻机钻完一级钻孔后需移开车载钻机,下套管固孔后再进行钻机找孔,实现动力头中心与钻孔中心对中后,进行下一级钻孔的施工,操作繁琐、时间长、精度低、安全性差。因此,发明一种车载钻机钻进现场自动找孔系统及实施方法对于缩短施工工期、提高钻孔质量、减轻劳动强度、提高施工安全性具有重要意义。发明内容[0004] 针对现有技术中的缺陷和不足,本发明提供了一种车载钻机钻进现场自动找孔系统及实施方法,克服现有动力头中心与钻孔中心完成对中时间长、对中精度低等缺陷。[0005] 为达到上述目的,本发明采取如下的技术方案:[0006] 一种车载钻机钻进现场自动找孔系统,包括汽车底盘、设在汽车底盘上的钻机机架和设在钻机机架上的回转器,在汽车底盘和钻机机架之间设有斜撑油缸,且斜撑油缸靠近汽车底盘和钻机机架后部;所述汽车底盘和钻机机架后端铰接;还包括设在汽车底盘两侧的竖向的前左支腿和前右支腿、设在前左支腿下方的前左平移副、设在前右支腿下方的前右平移副、设在汽车底盘后端的竖向的后左支腿和后右支腿、设在后左支腿和后右支腿下方的后平移副、钻孔定位单元以及电液控制单元;所述前左支腿、前右支腿、后左支腿和后右支腿均为竖向油缸伸缩结构;所述后平移副上表面两端设有左测距传感器和右测距传感器,上表面中部设有信号发生器,后平移副下表面中部设有矩形凹槽;[0007] 所述钻孔定位单元包括钻孔定位板,钻孔定位板一侧设有半圆形缺口,另一侧为滑动平台,滑动平台厚度小于钻孔定位板厚度,滑动平台与钻孔定位板相接处的钻孔定位板的侧壁为垂直侧壁;所述后平移副能置于滑动平台上且后平移副的长度小于等于滑动平台的长度,在滑动平台中心设有竖向弹簧,弹簧上端设有能配合插入所述矩形凹槽内的矩形的卡位板,在靠近垂直侧壁的钻孔定位板中部设有能与所述信号发生器配合的信号接收器;[0008] 所述电液控制单元能控制前左支腿、前右支腿、后左支腿和后右支腿分别带动前左平移副、前右平移副以及后平移副竖向伸缩,还能控制前左平移副、前右平移副以及后平移副分别带动前左支腿、前右支腿、后左支腿和后右支腿平移,以及控制左测距传感器、右测距传感器、信号发生器和信号接收器工作。[0009] 本发明还包括如下技术特征:[0010] 具体的,所述前左平移副包括前左平移板、前左油缸和前左滑块;所述前左平移板上设有滑槽,前左滑块和前左油缸安装在前左平移板上的滑槽内,且前左油缸的伸缩杆端部连接所述前左滑块以驱动前左滑块沿滑槽左右移动;[0011] 所述前右平移副包括前右平移板、前右油缸和前右滑块;所述前右平移板上设有滑槽,前右滑块和前右油缸安装在前右平移板上的滑槽内,且前右油缸的伸缩杆端部连接所述前右滑块以驱动前右滑块沿滑槽左右移动;[0012] 所述前左平移板上的滑槽和前右平移板上的滑槽位于同一直线上;所述前左油缸设在前左滑块的左侧且前右油缸设在前右滑块的左侧;[0013] 所述前左平移板和前右平移板之间插接接通过销轴连接。[0014] 具体的,所述后平移副包括后平移板、设在后平移板上的后左滑块和后右滑块以及设在后左滑块左侧的后左油缸和设在后右滑块左侧的后右油缸;[0015] 所述后平移板上设有滑槽,后左油缸和后右油缸固定在滑槽内,后左滑块和后右滑块安装在滑槽内,且后左油缸的伸缩杆端部连接后左滑块以驱动后左滑块在滑槽内移动,后右油缸的伸缩杆端部连接后右滑块以驱动后右滑块在滑槽内移动。[0016] 具体的,所述前左滑块、前右滑块、后左滑块和后右滑块上均设有球形槽,前左支腿下端球形端部置于前左滑块的球形槽内,前右支腿下端球形端部置于前右滑块的球形槽内,后左支腿下端球形端部置于后左滑块的球形槽内,后右支腿下端球形端部置于后右滑块的球形槽内。[0017] 具体的,所述电液控制单元包括控制器、用以远距离操纵控制器的遥控器、能被控制器控制以驱动前左支腿和前右支腿伸缩的支腿前换向阀、能被控制器控制以驱动后左支腿和后右支腿伸缩的支腿后换向阀、能被控制器控制以驱动前左油缸和前右油缸伸缩的平移前换向阀、能被控制器控制以驱动后左油缸和后右油缸伸缩的平移后换向阀、支腿前单向阀、支腿后单向阀、平移前单向阀和平移后单向阀。[0018] 具体的,在钻机机架立起状态下,回转器中心到后平移副后侧壁的垂直距离为X;钻孔定位板的半圆形缺口的圆心到钻孔定位板的垂直侧壁的垂直距离为Y;且X=Y。
[0019] 具体的,所述滑动平台上设有滑动衬板,滑动衬板垂直紧贴所述垂直侧壁;所述滑动衬板和滑动平台上设有沉头槽,在沉头槽内安装所述竖向弹簧;所述半圆形缺口位于钻孔定位板后边缘的中部。[0020] 本发明还提供一种车载钻机钻进现场自动找孔的实施方法,该方法通过所述的车载钻机钻进现场自动找孔系统进行自动找孔;包括以下步骤:[0021] 步骤1,在钻孔位置确定后通过吊车将钻孔定位单元吊放在对应位置以使钻孔定位板的半圆形缺口圆心与钻孔中心重合,车载钻机驶入钻场,根据钻孔位置,采用倒车的方式进行初步定位,后平移副支撑位置落入钻孔定位单元的滑动平台上;[0022] 步骤2,遥控器远距离操纵控制器,开启自动找孔系统,控制器调整支腿前换向阀、支腿后换向阀至下位,前左支腿、前右支腿、后左支腿和后右支腿伸出,使前左平移副和前右平移副支撑于地上,后平移副支撑于滑动平台上,并将卡位板压入沉头槽内;[0023] 步骤3,左测距传感器和右测距传感器检测后平移副左右两端与垂直侧壁的距离为L1和L2,当L1<L2时,说明钻机整体方位往左偏,控制器控制平移前换向阀至下位,平移后换向阀至中位锁定,前左油缸和前右油缸伸长推动前左滑块和前右滑块,使前左支腿和前右支腿向右移动,后平移副在滑动平台上滑动,车载钻机整体向右摆动;油缸行程S走完后,控制器控制平移前换向阀至上位,支腿前换向阀至上位,前左平移副和前右平移副离开地面,并相对前左支腿和前右支腿运动至初始位置;[0024] 步骤4,控制器控制支腿前换向阀至下位,前左平移副和前右平移副再次支撑于地面后,重复步骤3再次推动车载钻机整体向右摆动,直至L1=L2后,停止运动,车载钻机方位摆正;[0025] 步骤5,信号接收器接收到信号发生器信号后,判断信号的方位,当信号处于信号接收器右侧时,钻机整体位置偏右,控制器控制平移前换向阀和平移后换向阀至上位,前左油缸、前右油缸、后左油缸、后右油缸同步向左平移,重复不走3油缸行程S走完后的动作,当信号接收器位置与信号发生器位置重合,停止运动;[0026] 步骤6,前左支腿和前右支腿缩回,前左平移副和前右平移副移离地面,去掉前左平移副和前右平移副中间的连接销轴,将前左平移副和前右平移副分别绕前左支腿和前右支腿旋转90°,平移前换向阀至下位,前左油缸和前右油缸伸长推动前左滑块和前右滑块,使前左支腿和前右支腿向钻孔中心运动,后平移副在滑动平台上平移,重复步骤3油缸行程S走完后的动作,当后平移副后侧面与垂直侧壁接触后,或卡位板自动弹出卡入矩形凹槽内,停止运动,车载钻机回转器中心与钻孔中心完成对中,自动找孔完成。[0027] 步骤3中,若为L1>L2,则车载钻机整体右偏,前左平移副和前右平移副中的油缸运动方向相反,重复步骤3至6实现钻机自动找孔。[0028] 本发明与现有技术相比,有益的技术效果是:[0029] 本发明通过电液控制前左平移副,前右平移副,后平移副操纵车载钻机左右、前后平移,进行方位摆正和位置调整,左右测距传感器、信号发生器、信号接收器的反馈信号与平移距离形成闭环控制,保证钻机的位置精度,卡位板通过机械定位增加了平移系统的可靠性。克服了由于外形尺寸和整备质量过大的因素,车载钻机驾驶难度大,调整车身使回转器中心与钻孔中心完成对中时间长、对中精度低的难题,实现了车载钻机在钻进现场快速完成回转器中心与钻孔中心对中,不仅大大提高了工作效率,而且比人工定位更加精准,大大缩短了钻机钻进前期准备时间。[0030] 该系统及实施方法可使车载钻机在钻进现场快速完成回转器与钻孔中心的精确对中,通过遥控器,一键控制车载钻机自动找孔,避免了人工倒车导致的视觉盲区和误差,减少了钻机施工前期准备及多级钻孔对中定位的时间,提高了工作效率,减轻了人工劳动强度。附图说明[0031] 图1为本发明自动找孔系统的整体结构示意图。[0032] 图2为本发明钻机自动找孔完成后的示意图。[0033] 图3为本发明前左平移副和前右平移副的整体结构示意图。[0034] 图4为本发明前左平移副和前右平移副旋转90°后自动找孔系统的示意图。[0035] 图5为本发明后平移副的整体结构示意图。[0036] 图6为本发明钻孔定位单元的整体结构示意图。[0037] 图7为本发明电液控制单元的原理图。[0038] 图8为本发明自动找孔过程中平移副及钻孔定位装置的状态、位置示意图。[0039] 附图标号含义:[0040] 1.汽车底盘,2.钻机机架,3.回转器,4.斜撑油缸,5.前左支腿,6.前右支腿,7.前左平移副,8.前右平移副,9.后左支腿,10.后右支腿,11.后平移副,12.钻孔定位单元,13.电液控制单元,14.左测距传感器,15.右测距传感器,16.信号发生器,17.信号接收器;[0041] 7?1.前左平移板,7?2.前左油缸,7?3.前左滑块;[0042] 8?1.前右平移板,8?2.前右油缸,8?3.前右滑块;[0043] 11?1.后平移板,11?2.后左滑块,11?3.后右滑块,11?4.后左油缸,11?5.后右油缸,11?6.矩形凹槽;[0044] 12?1.钻孔定位板,12?2.半圆形缺口,12?3.滑动平台,12?4.垂直侧壁,12?5.弹簧,12?6.卡位板,12?7.滑动衬板,12?8.沉头槽;[0045] 13?1.控制器,13?2.遥控器,13?3.支腿前换向阀,13?4.支腿后换向阀,13?5.平移前换向阀,13?6.平移后换向阀,13?7.支腿前单向阀,13?8.支腿后单向阀,13?9.平移前单向阀,13?10.平移后单向阀。[0046] 以下结合说明书附图和具体实施方式对本发明做具体说明。具体实施方式[0047] 遵从上述技术方案,以下给出本发明的具体实施例,需要说明的是本发明并不局限于以下具体实施例,凡在本申请技术方案基础上做的等同变换均落入本发明的保护范围。下面结合实施例对本发明做进一步详细说明。[0048] 实施例1:[0049] 如图1至图7所示,本实施例提供一种车载钻机钻进现场自动找孔系统,包括汽车底盘1、设在汽车底盘1上的钻机机架2和设在钻机机架2上的回转器3,在汽车底盘1和钻机机架2之间设有斜撑油缸4,且斜撑油缸4靠近汽车底盘1和钻机机架2后部,通过斜撑油缸4伸缩实现钻机机架2的起立和下放;汽车底盘1和钻机机架2后端铰接;还包括设在汽车底盘1两侧的竖向的前左支腿5和前右支腿6、设在前左支腿5下方的前左平移副7、设在前右支腿
6下方的前右平移副8、设在汽车底盘1后端的竖向的后左支腿9和后右支腿10、设在后左支腿9和后右支腿10下方的后平移副11、钻孔定位单元12以及电液控制单元13;前左支腿5、前右支腿6、后左支腿9和后右支腿10均为竖向油缸伸缩结构;后平移副11上表面两端设有左测距传感器14和右测距传感器15,上表面中部设有信号发生器16,后平移副11下表面中部设有矩形凹槽11?6。
[0050] 钻孔定位单元12包括钻孔定位板12?1,钻孔定位板12?1一侧设有半圆形缺口12?2,另一侧为滑动平台12?3,滑动平台12?3厚度小于钻孔定位板12?1厚度,滑动平台12?3与钻孔定位板12?1相接处的钻孔定位板12?1的侧壁为垂直侧壁12?4;后平移副11能置于滑动平台12?3上且后平移副11的长度小于等于滑动平台12?3的长度,在滑动平台12?3中心设有竖向的弹簧12?5,弹簧12?5上端设有能配合插入矩形凹槽11?1内的矩形的卡位板12?6,在靠近垂直侧壁12?4的钻孔定位板12?1中部设有能与信号发生器16配合的信号接收器17。
[0051] 电液控制单元13能控制前左支腿5、前右支腿6、后左支腿9和后右支腿10分别带动前左平移副7、前右平移副8以及后平移副11竖向伸缩,还能控制前左平移副7、前右平移副8以及后平移副11分别带动前左支腿5、前右支腿6、后左支腿9和后右支腿10平移,以及控制左测距传感器14、右测距传感器15、信号发生器16和信号接收器17工作。[0052] 如图3所示,前左平移副7包括前左平移板7?1、前左油缸7?2和前左滑块7?3;前左平移板7?1上设有滑槽,前左滑块7?3和前左油缸7?2安装在前左平移板7?1上的滑槽内,且前左油缸7?2的伸缩杆端部连接前左滑块7?3以驱动前左滑块7?3沿滑槽左右移动;前右平移副8包括前右平移板8?1、前右油缸8?2和前右滑块8?3;前右平移板8?1上设有滑槽,前右滑块8?3和前右油缸8?2安装在前右平移板8?1上的滑槽内,且前右油缸8?2的伸缩杆端部连接前右滑块8?3以驱动前右滑块8?3沿滑槽左右移动;前左平移板7?1上的滑槽和前右平移板8?1上的滑槽位于同一直线上;前左油缸7?2设在前左滑块7?3的左侧且前右油缸8?2设在前右滑块8?3的左侧;前左平移板7?1和前右平移板8?1之间插接接通过销轴连接。[0053] 如图5所示,后平移副1包括后平移板11?1、设在后平移板11?1上的后左滑块11?2和后右滑块11?3以及设在后左滑块11?2左侧的后左油缸11?4和设在后右滑块11?3左侧的后右油缸11?5;后平移板11?1上设有滑槽,后左油缸11?4和后右油缸11?5固定在滑槽内,后左滑块11?2和后右滑块11?3安装在滑槽内,且后左油缸11?4的伸缩杆端部连接后左滑块11?2以驱动后左滑块11?2在滑槽内移动,后右油缸11?5的伸缩杆端部连接后右滑块11?3以驱动后右滑块11?3在滑槽内移动。
[0054] 前左滑块7?3、前右滑块8?3、后左滑块11?2和后右滑块11?3上均设有球形槽,前左支腿5下端球形端部置于前左滑块7?3的球形槽内,前右支腿6下端球形端部置于前右滑块8?3的球形槽内,后左支腿9下端球形端部置于后左滑块11?2的球形槽内,后右支腿10下端球形端部置于后右滑块11?3的球形槽内。如图4所示,前左平移副7和前右平移副8能分别绕前左支腿5和前右支腿6水平转动。
[0055] 如图7所示,电液控制13单元包括控制器13?1、用以远距离操纵控制器13?1的遥控器13?2、能被控制器13?1控制以驱动前左支腿5和前右支腿6伸缩的支腿前换向阀13?3、能被控制器13?1控制以驱动后左支腿9和后右支腿10伸缩的支腿后换向阀13?4、能被控制器13?1控制以驱动前左油缸7?2和前右油缸8?2伸缩的平移前换向阀13?5、能被控制器13?1控制以驱动后左油缸11?4和后右油缸11?5伸缩的平移后换向阀13?6、支腿前单向阀13?7、支腿后单向阀13?8、平移前单向阀13?9和平移后单向阀13?10。通过控制器顺序动作操纵车载钻机左右、前后平移,进行方位摆正和位置调整,实现钻机钻进现场自动找孔;支腿前单向阀能控制前左支腿和前右支腿在所需位置锁死,支腿后单向阀能控制后左支腿和后右支腿在所需位置锁死,平移前单向阀能控制前左油缸和前右油缸在所需位置锁死,平移后单向阀能控制后左油缸和后右油缸在所需位置锁死。
[0056] 在钻机机架2立起状态下,回转器3中心到后平移副11后侧壁的垂直距离为X(图2所示);钻孔定位板12?1的半圆形缺口的圆心到钻孔定位板12?1的垂直侧壁12?4的垂直距离为Y(图6所示);且X=Y。[0057] 如图6所示,滑动平台12?3上设有滑动衬板12?7,滑动衬板12?7垂直紧贴垂直侧壁12?4;滑动衬板12?7和滑动平台12?3上设有沉头槽12?8,在沉头槽12?8内安装弹簧12?5;半圆形缺口位于钻孔定位板12?1后边缘的中部。
[0058] 实施例2:[0059] 本实施例提供一种车载钻机钻进现场自动找孔的实施方法,该方法通过实施例1的车载钻机钻进现场自动找孔系统进行自动找孔;如图8所示,包括以下步骤:[0060] 步骤1,在钻孔位置确定后通过吊车将钻孔定位单元吊放在对应位置以使钻孔定位板的半圆形缺口圆心与钻孔中心重合,车载钻机驶入钻场,根据钻孔位置,采用倒车的方式进行初步定位,后平移副支撑位置落入钻孔定位单元的滑动平台上;[0061] 步骤2,遥控器远距离操纵控制器,开启自动找孔系统,控制器调整支腿前换向阀、支腿后换向阀至下位,前左支腿、前右支腿、后左支腿和后右支腿伸出,使前左平移副和前右平移副支撑于地上,后平移副支撑于滑动平台上,并将卡位板压入沉头槽内;[0062] 步骤3,如图8(a),左测距传感器和右测距传感器检测后平移副左右两端与垂直侧壁的距离为L1和L2,当L1<L2时,说明钻机整体方位往左偏,控制器控制平移前换向阀至下位,平移后换向阀至中位锁定,前左油缸和前右油缸伸长推动前左滑块和前右滑块,使前左支腿和前右支腿向右移动,后平移副在滑动平台上滑动,车载钻机整体向右摆动;油缸行程S走完后,控制器控制平移前换向阀至上位,支腿前换向阀至上位,前左平移副和前右平移副离开地面,并相对前左支腿和前右支腿运动至初始位置;[0063] 步骤4,控制器控制支腿前换向阀至下位,前左平移副和前右平移副再次支撑于地面后,重复步骤3再次推动车载钻机整体向右摆动,直至L1=L2后,如图8(b),停止运动,车载钻机方位摆正;[0064] 步骤5,信号接收器接收到信号发生器信号后,判断信号的方位,当信号处于信号接收器右侧时,钻机整体位置偏右,控制器控制平移前换向阀和平移后换向阀至上位,前左油缸、前右油缸、后左油缸、后右油缸同步向左平移,重复不走3油缸行程S走完后的动作,当信号接收器位置与信号发生器位置重合,停止运动,如图8(c);[0065] 步骤6,前左支腿和前右支腿缩回,前左平移副和前右平移副移离地面,去掉前左平移副和前右平移副中间的连接销轴,将前左平移副和前右平移副分别绕前左支腿和前右支腿旋转90°(如图8d),平移前换向阀至下位,前左油缸和前右油缸伸长推动前左滑块和前右滑块,使前左支腿和前右支腿向钻孔中心运动,后平移副在滑动平台上平移,重复步骤3油缸行程S走完后的动作,当后平移副后侧面与垂直侧壁接触后,或卡位板自动弹出卡入矩形凹槽内,停止运动,车载钻机回转器中心与钻孔中心完成对中(如图8e),自动找孔完成。[0066] 若为L1>L2,则车载钻机整体右偏,前左平移副和前右平移副中的油缸运动方向相反,重复步骤3至6实现钻机自动找孔。
声明:
“车载钻机钻进现场自动找孔系统及实施方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 426
编辑:中冶有色技术网
来源:中煤科工集团西安研究院有限公司
426
编辑:中冶有色技术网
来源:中煤科工集团西安研究院有限公司
 分享 0
分享 0
 举报 0
举报 0
 收藏 0
收藏 0
 反对 0
反对 0
 点赞 0
点赞 0






































































 中冶有色技术平台
中冶有色技术平台

 2024年05月31日 ~ 06月02日
2024年05月31日 ~ 06月02日 



 换一批
换一批




