权利要求书: 1.一种移动升降式全自动输送带清洗车,其特征在于,包括:运载机构、所述运载机构上设置有升降机构,所述升降机构的一侧设置有伸缩机构,所述升降机构的另一侧设置有伸缩护栏和载人踏板,所述伸缩机构上设置有水箱,所述水箱上设置有清洗机,所述水箱通过旋转机构与所述清洗机连接。
2.根据权利要求1所述的移动升降式全自动输送带清洗车,其特征在于,所述移动升降式全自动输送带清洗车还包括自适应定位机构,用于辅助所述清洗机与输送机侧板自适应对接。
3.根据权利要求2所述的移动升降式全自动输送带清洗车,其特征在于,所述移动升降式全自动输送带清洗车还包括清洗机机架,用于安装所述清洗机,所述自适应定位机构包括柔性平衡组件,对称地设置在所述清洗机和所述清洗机机架之间。
4.根据权利要求3所述的移动升降式全自动输送带清洗车,其特征在于,所述柔性平衡组件包括气弹簧。
5.根据权利要求3所述的移动升降式全自动输送带清洗车,其特征在于,所述移动升降式全自动输送带清洗车还包括设置在所述伸缩机构上的水箱架体,所述水箱设置在所述水箱架体内部,所述自适应定位机构还包括柔性平移组件,通过滑轨组件与所述水箱架体连接,并通过所述旋转机构与所述清洗机机架连接。
6.根据权利要求5所述的移动升降式全自动输送带清洗车,其特征在于,所述柔性平移组件包括复位弹簧。
7.根据权利要求1所述的移动升降式全自动输送带清洗车,其特征在于,所述伸缩机构包括电动伸缩机构。
8.根据权利要求7所述的移动升降式全自动输送带清洗车,其特征在于,所述电动伸缩机构包括电动推杆和承载滑台,所述承载滑台设置在所述升降机构上,所述电动推杆设置在所述升降机构和所述承载滑台之间,以实现所述承载滑台的往复平移。
9.根据权利要求1所述的移动升降式全自动输送带清洗车,其特征在于,所述旋转机构包括电动旋转机构。
10.根据权利要求9所述的移动升降式全自动输送带清洗车,其特征在于,所述电动旋转机构包括旋转电机和旋转组件,所述电动旋转机构通过所述旋转电机带动所述旋转组件旋转。
说明书: 移动升降式全自动输送带清洗车技术领域[0001] 本实用新型涉及卷烟设备技术领域,尤其涉及一种移动升降式全自动输送带清洗车。
背景技术[0002] 由于卷烟制丝生产线上热端设备较多,烟丝进入输送机时温度较高,烟丝表面的烟油、烟垢会粘附在输送带上,输送机自带的毛刷辊无法清除。目前卷烟厂一般采用人工清
洗方式清理输送带上的污垢,由于烟草制丝线上的输送机很多,人员劳动强度大,清理速度
慢,不能满足保养需求。
[0003] 针对较低位置的输送带设计出移动式的输送带自动清洗车,大大提高了清洗效率。但是针对比较高位置的输送带,地面的移动式清洗机无法作业,人工作业又有高空作业
的风险。
[0004] 因此,亟需一种移动升降式全自动输送带清洗车。实用新型内容
[0005] 本实用新型的目的是提供一种移动升降式全自动输送带清洗车,以解决上述现有技术中的问题,能够替代人工清洗输送带,实现高空输送带表面的自动清洗。
[0006] 本实用新型提供了一种移动升降式全自动输送带清洗车,其中,包括:[0007] 运载机构、所述运载机构上设置有升降机构,所述升降机构的一侧设置有伸缩机构,所述升降机构的另一侧设置有伸缩护栏和载人踏板,所述伸缩机构上设置有水箱,所述
水箱上设置有清洗机,所述水箱通过旋转机构与所述清洗机连接。
[0008] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述移动升降式全自动输送带清洗车还包括自适应定位机构,用于辅助所述清洗机与输送机侧板自适应对
接。
[0009] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述移动升降式全自动输送带清洗车还包括清洗机机架,用于安装所述清洗机,所述自适应定位机构包括柔
性平衡组件,对称地设置在所述清洗机和所述清洗机机架之间。
[0010] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述柔性平衡组件包括气弹簧。
[0011] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述移动升降式全自动输送带清洗车还包括设置在所述伸缩机构上的水箱架体,所述水箱设置在所述水箱架
体内部,所述自适应定位机构还包括柔性平移组件,通过滑轨组件与所述水箱架体连接,并
通过所述旋转机构与所述清洗机机架连接。
[0012] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述柔性平移组件包括复位弹簧。
[0013] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述伸缩机构包括电动伸缩机构。
[0014] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述电动伸缩机构包括电动推杆和承载滑台,所述承载滑台设置在所述升降机构上,所述电动推杆设置在所
述升降机构和所述承载滑台之间,以实现所述承载滑台的往复平移。
[0015] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述旋转机构包括电动旋转机构。
[0016] 如上所述的移动升降式全自动输送带清洗车,其中,优选的是,所述电动旋转机构包括旋转电机和旋转组件,所述电动旋转机构通过所述旋转电机带动所述旋转组件旋转。
[0017] 本实用新型提供一种移动升降式全自动输送带清洗车,利用运载机构作为载体,控制清洗机的行走,利用升降机构控制清洗机的升降,将水箱和清洗机放在伸缩机构上与
升降机构一同上升,升至指定位置进行清洗作业,工作人员站在载人踏板上也一同上升,利
用伸缩机构调节清洗机的前后位置;利用旋转机构转动清洗机,以适应输送带下方的角度
调整定位;因此能够替代人工清洗输送带,实现高空输送带表面的自动清洗。
附图说明[0018] 为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步描述,其中:
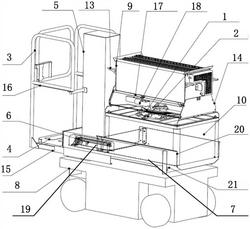
[0019] 图1为本实用新型提供的移动升降式全自动输送带清洗车的实施例的结构示意图;
[0020] 图2为本实用新型提供的移动升降式全自动输送带清洗车与输送带对正过程的结构示意图。
[0021] 附图标记说明:[0022] 1?旋转组件2?柔性平移组件3?伸缩护栏[0023] 4?载人踏板5?升降机构6?电动推杆[0024] 7?承载滑台8?运载机构9?清洗机[0025] 10?水箱11?输送带12?限位卡板[0026] 13?定位轴14?清洗机机架15?第一滑轨[0027] 16?第二滑轨17?柔性平衡组件18?旋转电机[0028] 19?伸缩机构20?水箱架体21?滚轮导向支撑机构具体实施方式[0029] 现在将参照附图来详细描述本公开的各种示例性实施例。对示例性实施例的描述仅仅是说明性的,决不作为对本公开及其应用或使用的任何限制。本公开可以以许多不同
的形式实现,不限于这里所述的实施例。提供这些实施例是为了使本公开透彻且完整,并且
向本领域技术人员充分表达本公开的范围。应注意到:除非另外具体说明,否则在这些实施
例中阐述的部件和步骤的相对布置、材料的组分、数字表达式和数值应被解释为仅仅是示
例性的,而不是作为限制。
[0030] 本公开中使用的“第一”、“第二”:以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的部分。“包括”或者“包含”等类似的词语意指在该词前的要素
涵盖在该词后列举的要素,并不排除也涵盖其他要素的可能。“上”、“下”等仅用于表示相对
位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
[0031] 在本公开中,当描述到特定部件位于第一部件和第二部件之间时,在该特定部件与第一部件或第二部件之间可以存在居间部件,也可以不存在居间部件。当描述到特定部
件连接其它部件时,该特定部件可以与所述其它部件直接连接而不具有居间部件,也可以
不与所述其它部件直接连接而具有居间部件。
[0032] 本公开使用的所有术语(包括技术术语或者科学术语)与本公开所属领域的普通技术人员理解的含义相同,除非另外特别定义。还应当理解,在诸如通用字典中定义的术语
应当被解释为具有与它们在相关技术的上下文中的含义相一致的含义,而不应用理想化或
极度形式化的意义来解释,除非这里明确地这样定义。
[0033] 对于相关领域普通技术人员已知的技术、方法和设备可能不作详细讨论,但在适当情况下,技术、方法和设备应当被视为说明书的一部分。
[0034] 如图1所示,本实用新型实施例提供了一种移动升降式全自动输送带清洗车,其包括:
[0035] 运载机构8、所述运载机构8上设置有升降机构5,所述升降机构5的一侧设置有伸缩机构19,所述升降机构5的另一侧设置有伸缩护栏3和载人踏板4,所述伸缩机构19上设置
有水箱10,所述水箱10上设置有清洗机9,所述水箱10通过旋转机构与所述清洗机9连接。
[0036] 其中,所述运载机构8包括运载小车,作为一个示例而非限制,所述运载小车为电动车。所述升降机构5固定于运载机构8的后部中间位置,通过电动液压机构实现升降功能,
具体地,所述升降机构5包括桅杆式升降机构。具体而言,所述升降机构5包括位于所述升降
机构5下部的下端架体和位于所述下部架体5上的桅杆。可以通过遥控器对运载机构8的前
进、后退以及转弯等进行控制,也可以通过遥控器对升降机构5的上升、下降等进行控制。
[0037] 进一步地,所述载人踏板4可折叠,并通过第一铰轴结构与所述下端架体连接,即载人踏板4通过第一铰轴机构与升降机构5的底部连接,载人踏板4不用时可收纳起来,在使
用时展开,供工作人员站立。所述伸缩护栏3可以对工作人员提供安全防护,并且可以节省
设备的占地空间。示例性地,载人踏板4和伸缩护栏3均为人工手动打开,在工作中,先将伸
缩护栏3拉伸出来,再将载人踏板4放下,打开伸缩护栏3的护栏门,工作人员站在载人踏板4
上,合上护栏门,然后操作运载机构8行走或操作升降机构5升降。工作人员从载人踏板4上
下来后,需先折叠载人踏板4,然后把伸缩护栏3缩回原处,以节省设备占用空间。
[0038] 在工作中,利用运载机构8控制清洗机9行走到指定位置,然后利用升降机构5控制清洗机9上升到指定高度,在与输送机的侧板牢固连接后开始清洗作业,并且在运载机构8
行走到指定位置的过程中,以及在清洗机9与输送机的侧板牢固连接的过程中,利用伸缩机
构19调节清洗机的前后位置,利用旋转机构转动清洗机9,以适应输送带11下方的角度调整
定位;将水箱10和清洗机9放在伸缩机构19上与升降机构5一同上升,工作人员站在载人踏
板上也一同上升,便于观察输送带11处的工作状况,并给出操作指令,操作指令例如为前
进、后退、转弯、上升、下降等。
[0039] 由此,相对于现有技术而言,本实施例提供的移动升降式全自动输送带清洗车,利用运载机构作为载体,控制清洗机的行走,利用升降机构控制清洗机的升降,将水箱和清洗
机放在伸缩机构上与升降机构一同上升,升至指定位置进行清洗作业,工作人员站在载人
踏板上也一同上升,利用伸缩机构调节清洗机的前后位置;利用旋转机构转动清洗机,以适
应输送带下方的角度调整定位;因此能够替代人工清洗输送带,实现高空输送带表面的自
动清洗。
[0040] 进一步地,所述移动升降式全自动输送带清洗车还包括自适应定位机构,用于辅助所述清洗机9与输送机侧板自适应对接。借助于自适应定位机构,可以实现自适应定位,
被动的帮助清洗机与输送机侧板自适应对接。
[0041] 具体而言,所述移动升降式全自动输送带清洗车还包括清洗机机架14,用于安装所述清洗机9,所述自适应定位机构包括柔性平衡组件17,柔性平衡组件17的数量为两个,
对称地设置在所述清洗机9两侧,并与所述清洗机机架14连接,以在待清洗的输送带倾斜
时,辅助所述清洗机9呈与输送带相适应的倾斜状态,并在清洗结束后,使所述清洗机9回复
到水平状态。进一步地,清洗机9通过所述柔性平衡组件17和铰轴连接机构与清洗机机架14
连接。示例性地,所述柔性平衡组件17包括气弹簧。
[0042] 进一步地,所述移动升降式全自动输送带清洗车还包括设置在所述伸缩机构19上的水箱架体20,所述水箱10设置在所述水箱架体20内部,所述自适应定位机构还包括柔性
平移组件2,通过滑轨组件与所述水箱架体20连接,并通过所述旋转机构与所述清洗机机架
14连接,以在所述清洗机9与所述输送机侧板对接过程中,保持所述清洗机平衡,并在清洗
结束后,使所述清洗机9回复到位于所述水箱10的居中位置。示例性地,所述柔性平移组件2
包括复位弹簧,柔性平移组件2的数量也为2个,对称地设置在承载滑台7两侧。进一步地,用
于安装水箱10的水箱架体20的底部通过滚轮导向支撑机构21和电动推杆6与升降机构5的
底部(即下端架体)连接。并且所述水箱10包括清水箱和污水箱和排污机构。
[0043] 进一步地,所述伸缩机构19包括电动伸缩机构。具体地,所述电动伸缩机构包括电动推杆6和承载滑台7,所述承载滑台7设置在所述升降机构5上,所述电动推杆6设置在所述
升降机构5和所述承载滑台7之间,以实现所述承载滑台7的往复平移。更具体地,借助于电
动推杆6,可以实现承载滑台7在运载机构8的行进方向上的往复平移。示例性地,可以通过
无线遥控器控制电动推杆6的运行。
[0044] 更进一步地,所述旋转机构包括电动旋转机构。具体地,所述电动旋转机构包括旋转电机18和旋转组件1,所述电动旋转机构通过所述旋转电机18带动所述旋转组件1旋转。
示例性地,可以通过无线遥控器控制旋转电机18的运行。
[0045] 进一步地,所述移动升降式全自动输送带清洗车还包括第一滑轨15(左右各一个)和第二滑轨16(左右各一个),所述伸缩护栏3通过所述第一滑轨15和所述第二滑轨16与所
述升降机构5连接,这样可以利用第一滑轨15和第二滑轨16的滑动特性,实现伸缩护栏3的
伸缩功能。其中,所述第二滑轨16的高度大于所述第一滑轨15的高度,并且所述第二滑轨16
与所述桅杆连接,所述第一滑轨15与所述下端架体连接。
[0046] 工作人员在操作清洗车进行清洁作业时,伸出伸缩护栏3,站在载人踏板4上或者在地面通过遥控器操控运载机构8,控制运载机构8行驶至输送机下方的待清洗位置,通过
遥控器操作升降机构5抬升,将水箱10和清洗机9抬高到清洗输送带11作业的高度,即工作
人员可以按照具体情况需求,选择是站在伸缩护栏3里进行操作,还是站在地面通过遥控进
行控制;然后通过无线遥控器操控电动推杆6伸缩,以调节清洗机9垂直于输送带11方向的
位置;通过无线遥控器操控旋转机构旋转,以调节清洗机9在对正过程中的偏差角度;如图2
所示,在调节清洗机9的过程中,清洗机9需与安装在输送机侧板上的限位卡板12对正,在对
正过程中,通过柔性平衡组件17(气弹簧)可以自适应调节清洗机9平行于输送带11表面的
旋转角度;通过柔性平移组件2(复位弹簧)可以自适应调节清洗机9垂直于输送机方向的左
右对中位置,直到清洗机9的定位轴13完全与限位卡板12的定位孔对正,定位轴13的数量为
4个。
[0047] 本实用新型实施例提供的移动升降式全自动输送带清洗车,利用运载机构作为载体,控制清洗机的行走,利用升降机构控制清洗机的升降,将水箱和清洗机放在伸缩机构上
与升降机构一同上升,升至指定位置进行清洗作业,工作人员站在载人踏板上也一同上升,
利用伸缩机构调节清洗机的前后位置;利用旋转机构转动清洗机,以适应输送带下方的角
度调整定位;因此能够替代人工清洗输送带,实现高空输送带表面的自动清洗。
[0048] 至此,已经详细描述了本公开的各实施例。为了避免遮蔽本公开的构思,没有描述本领域所公知的一些细节。本领域技术人员根据上面的描述,完全可以明白如何实施这里
公开的技术方案。
[0049] 虽然已经通过示例对本公开的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本公开的范围。本领域的技
术人员应该理解,可在不脱离本公开的范围和精神的情况下,对以上实施例进行修改或者
对部分技术特征进行等同替换。本公开的范围由所附权利要求来限定。
声明:
“移动升降式全自动输送带清洗车” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 259
编辑:中冶有色技术网
来源:河南中烟工业有限责任公司
259
编辑:中冶有色技术网
来源:河南中烟工业有限责任公司
 分享 0
分享 0
 举报 0
举报 0
 收藏 0
收藏 0
 反对 0
反对 0
 点赞 0
点赞 0






































































 中冶有色技术平台
中冶有色技术平台

 2024年05月17日 ~ 19日
2024年05月17日 ~ 19日 



 换一批
换一批




