1.本实用新型涉及石油钻井工程安全控制技术,尤其是涉及一种游车防撞猴台自动控制安全防护装置及一种游车防撞猴台自动安全防护系统。
背景技术:
2.随着石油钻井技术的不断发展,顶驱在钻井过程中可用立根钻进,减少2/3的上扣卸扣工作量。借助于倾斜臂和旋转头的作用,井口上卸扣作业和二层台作业的体力劳动强度大大减轻。在起下钻过程中遇卡或遇阻,可迅速使顶驱接上钻具,循环泥浆进行划眼作业。在下套管时,借助于吊环倾斜机构抓取套管,在上扣时顶驱有扶正作用,可避免乱扣错扣,大大提高下套管速度。在定向钻进中,可用刹车机构刹住顶驱主轴,进行定向造斜。因此,顶驱在国内外钻井中的应用越来越广泛。
3.但随着顶驱的广泛应用,其顶驱吊环和旋转头的特有作用,在特殊作业时也导致了一些事故的发生。比如,在起下钻作业时,需要井架工人爬上二层台,站在猴台处与司钻操作的机械吊臂相互配合,完成上扣卸扣、取放立根、接立根等作业。在实际顶驱操作时,由于司钻的误操作,会使伸出的顶驱吊环在完成某一项作业后未能及时归位,当游车上下游动时,伸出的顶驱吊环与井架工人所站的猴台相碰,从而导致严重的安全事故。目前,国内钻机都配备有防碰刹车系统,但这些防碰刹车装置有的不具备防撞猴台的功能,有的虽然有防撞猴台的功能,却是以牺牲工作效率为代价,即无论司钻是否有误操作,无论顶驱吊环否倾斜伸出,只要游车达到猴台位置,防碰装置都会采取刹车动作,强行中断正常的起下钻等作业流程。为解决上述问题,我们提出了一种石油钻机顶驱吊环防撞井架猴台的控制装置。
技术实现要素:
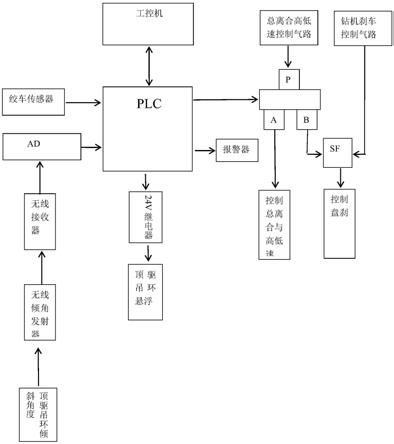
4.本实用新型针对现有技术不足,提出一种石油钻机顶驱吊环防撞井架猴台的无线控制装置,安装在顶驱吊环上的无线倾角发射传感器,实时检测顶驱顶驱吊环的伸出倾斜角度,发射接收之间通过无线传输,无线接收器给出对应的电流信号,经a/d模块采集处理后传输给plc。安装在绞车滚筒轴上的绞车传感器,实时检测游车大钩的高度位置信号,传输给plc数字信号输入端。plc依据设定的程序,自动分析判断游车大钩是否临近了猴台,顶驱吊环的倾斜角度是否超出安全范围,如果游车大钩既临近了猴台,顶驱吊环的倾斜角度又超出了安全范围,则自动控制系统迅速锁定游车,同时指令顶驱吊环的悬浮开关动作,迫使顶驱吊环的液压油缸收回顶驱吊环,最终达到防撞猴台的目的。
5.本实用新型采用的技术方案:
6.一种石油钻机顶驱吊环防撞井架猴台的无线控制装置,包括信号采集单元、无线倾角发射器单元、无线接收器、plc控制单元以及执行单元;所述信号采集单元包括绞车传感器/大钩位置传感器以及无线倾角发射器;所述绞车传感器/大钩位置传感器输出信号接入plc控制单元的数字信号输入端;所述无线倾角发射器检测顶驱吊环倾斜角度信号并经
无线接收器输入a/d模块处理后传输到plc控制单元;所述plc控制单元输出连接执行单元。
7.所述的石油钻井工程钻机/顶驱/游车防撞猴台无线控制装置,执行单元包括控制电磁阀以及梭阀和24v继电器;所述控制电磁阀和梭阀联锁到绞车滚筒和总离合高低速控制气路之中,构成盘刹连锁装置;控制电磁阀和梭阀气源进口分别连接气源,所述控制电磁阀的控制线圈连接plc控制单元的输出,所述控制电磁阀的输出口a连接控制总离合与高低速,控制电磁阀的输出口b连接梭阀的控制输入端,所述梭阀的输出连接控制盘刹。24v继电器常开触点控制悬浮开关,使顶驱吊环复位,防止挂撞猴台。
8.所述的石油钻井工程钻机/顶驱/游车防撞猴台无线控制装置,与plc控制单元通讯连接设有一体化工控机,与所述plc控制单元连接有报警单元。
9.实用新型有益效果:
10.1、本实用新型石油钻机顶驱吊环防撞井架猴台的无线控制装置,利用绞车传感器监测游车运行高度,通过无线倾角发射器检测顶驱吊环倾斜角度信号是否在可控范围内,继而通过自动控制盘刹刹车来防止由于误操作或意外因素造成顶驱吊环防撞猴台,既实现了钻机和游车的自动控制,又可以有效防止顶驱吊环挂、撞猴台,造成事故的发生。经济适用,且安全可靠。
11.2、本实用新型石油钻机顶驱吊环防撞井架猴台的无线控制装置,既实现了游车的自动刹车,有效防止误操作或意外失控导致事故的发生,消除安全隐患;全系统设计合理,容易实现,方便推广,具有较好的社会效益。
12.3、本实用新型石油钻机顶驱吊环防撞井架猴台的无线控制装置,适合国内外各种型号的钻机,通用性强,适应范围广,技术难度不大,性价比较高。
附图说明
13.图1是本实用新型石油钻机顶驱吊环防撞井架猴台的控制装置结构示意图之一;
14.图2是本实用新型石油钻机顶驱吊环防撞井架猴台的控制装置结构示意图之二;
15.图3是本实用新型石油钻机顶驱吊环防撞井架猴台的控制装置结构示意图之三。
具体实施方式
16.下面通过具体实施方式,对本实用新型技术方案做进一步的详细描述。
17.以下各实施例仅用于说明本实用新型,不应当构成对实用新型保护范围的限定。本领域技术人员在现有技术范围内,采用惯用技术手段的置换以及和现有技术进行简单组合,均不脱离本实用新型保护范围。
18.实施例1
19.参见图1,本实用新型石油钻机顶驱吊环防撞井架猴台的无线控制装置,包括信号采集单元、plc控制单元以及执行单元;所述信号采集单元包括绞车传感器/大钩位置传感器以及无线倾角发射器;所述绞车传感器/大钩位置传感器输出信号接入plc控制单元的数字信号输入端;所述无线倾角发射器检测顶驱吊环倾斜角度信号并经无线接收器输入a/d模块处理后传输到plc控制单元;所述plc控制单元输出连接执行单元控制电磁阀以及梭阀。
20.本实施例石油钻机顶驱吊环防撞井架猴台的无线控制装置的工作原理:
21.1)无线倾角发射器实时采集顶驱吊环倾斜角度按特定频率发送,无线接收器接收信号后转换成电流信号(4
?
20ma)后传输给a/d转换模块,a/d转换模块将电流信号值实时传输给plc控制单元分析处理;
22.2)应用绞车传感器/大钩位置传感器实时采集游车的高度的变化,并将捕捉到的信号值实时传输给plc控制单元分析处理,如果plc控制单元判断游车在某一高度位置上的顶驱吊环倾斜角度没有超过设定值,则猴台防撞控制系统不发出控制指令,此时游车的运行状态体现的是司钻正常的操作意图。反之,若顶驱吊环的倾斜角度超过了设定值,且游车高度也达到设定值,plc控制单元判断顶驱吊环即将碰撞猴台。此时plc控制单元发出连续声光报警指令,并通过刹车的指令传输给执行单元。
23.所述执行单元包括控制电磁阀以及梭阀;所述控制电磁阀和梭阀联锁到绞车滚筒和总离合高低速控制气路之中,构成盘刹连锁装置;控制电磁阀和梭阀气源进口分别连接气源,所述控制电磁阀的控制线圈连接plc控制单元的输出,所述控制电磁阀的输出口a连接控制总离合与高低速,控制电磁阀的输出口b连接梭阀的控制输入端,所述梭阀的输出连接控制盘刹。
24.控制电磁阀采用两位五通电磁阀,安装在总离合、高低速的开关控制气路上。电磁阀的进口p与控制气源相连,电磁阀的常开式出口a与总离合、高低速的开关控制气路连接,电磁阀的常闭式出口b与梭阀的一个进气口连接。梭阀的另一个进气口连接钻机的刹车控制气路,梭阀的出气口连接到刹车气缸的控制气路上,电磁阀的信号输入端口与plc的输出端口连接。
25.实施例2
26.参见图2,本实施例的石油钻机顶驱吊环防撞井架猴台的无线控制装置,包括信号采集单元、无线倾角发射器、电池组、无线接收器、plc控制单元以及执行单元;与实施例1不同的是所述信号采集单元包括绞车传感器/大钩位置传感器以及无线倾角发射器;所述绞车传感器/大钩位置传感器输出信号接入plc控制单元的数字信号输入端;所述无线倾角发射器检测顶驱吊环倾斜角度信号并经无线接收器输入a/d模块处理后传输到plc控制单元;所述plc控制单元输出连接执行单元控制电磁阀以及梭阀和24v继电器。
27.本实施例的工作原理:与所述a/d转换模块连接,在顶驱吊环上安装一无线倾角发射器组。所述无线倾角发射器实时采集顶驱吊环倾斜角度按特定频率发送,无线接收器接收信号后转换成电流信号(4
?
20ma)后传输给a/d转换模块,a/d转换模块将电流信号值实时传输给plc控制单元分析处理,从而分析判断顶驱吊环的倾斜角度。
28.绞车传感器实时采集游车的高度传输给plc。如果plc控制单元判断游车在某一高度位置上的顶驱吊环倾斜角度没有超过设定值,则猴台防撞控制系统不发出控制指令,此时游车的运行状态体现的是司钻正常的操作意图。反之,若游车高度超过了低限设定值,plc控制单元判断顶驱吊环即将碰撞猴台。此时plc控制单元发出声光报警指令,同时plc发出24v继电器线圈得电指令,线圈得电,并联在顶驱控制箱吊环悬浮按钮处的常开触点闭合,吊环中位电磁阀得电,倾斜油缸复位。当达到危险区间值时,并通过刹车的指令传输给执行单元。此时plc通过将刹车的指令传输给联锁在绞车滚筒和总离合的控制气路的电磁阀,令其迅速切断绞车滚筒和总离合的控制气路,接通盘刹的刹车气路从而锁定游车。此过程2秒完成后,游车刹车自动解锁或手动解锁,游车可继续上行或下行。
29.实施例3
30.本实施例的石油钻机顶驱吊环防撞井架猴台的无线控制装置,与前述各实施例不同的是,与所述plc控制单元通讯连接设有工控机,与所述plc控制单元连接有报警单元。对数据进行分析判断处理可以由工控机完成,然后发送控制指令给plc控制单元。技术特征:
1.一种石油钻机顶驱或游车防撞井架猴台的无线控制装置,包括信号采集单元、plc控制单元以及执行单元;其特征是:所述信号采集单元包括绞车传感器或大钩位置传感器以及无线倾角发射器单元和无线信号接收单元;所述绞车传感器或大钩位置传感器输出信号接入plc控制单元的一路数字信号输入端;无线倾角发射器单元采集顶驱吊环的倾斜角度变化信号发射给无线信号接收单元;所述无线信号接收单元接收到的信号经a/d模块处理后传输到plc控制单元;所述plc控制单元输出连接执行单元。2.根据权利要求1所述的石油钻机顶驱或游车防撞井架猴台的无线控制装置,其特征是:所述执行单元包括控制电磁阀以及梭阀和24v继电器;所述控制电磁阀和梭阀联锁到绞车滚筒和总离合高低速控制气路之中,构成盘刹连锁装置;控制电磁阀和梭阀气源进口分别连接气源,所述控制电磁阀的控制线圈连接plc控制单元的输出,所述控制电磁阀的常开式出口a与总离合、高低速的开关控制气路连接,控制电磁阀的输出口b连接梭阀的控制输入端,所述梭阀的输出连接控制盘刹;24v继电器常开触点控制悬浮开关,使顶驱吊环复位,防止挂撞猴台。3.根据权利要求1或2所述的石油钻机顶驱或游车防撞井架猴台的无线控制装置,其特征是:与所述plc控制单元通讯连接设有一体化工控机,与所述plc控制单元连接有报警单元。
技术总结
本实用新型涉及一种石油钻井工程安全防护装置。一种石油钻机顶驱或游车防撞井架猴台的无线控制装置,包括信号采集单元、无线倾角发射器单元、无线接收单元、PLC控制单元以及执行单元;信号采集单元包括绞车/大钩位置传感器以及无线倾角发射器单元;所述绞车/大钩位置传感器输出信号以及无线倾角发射器单元分别检测绞车位置、顶驱吊环倾斜角信号最终均传输到PLC控制单元;所述PLC控制单元输出连接执行单元。利用绞车传感器监测游车上/下行高度,同时利用无线倾角发射器单元检测顶驱吊环倾斜角度信号,以此来综合判断游车运行高度和吊环倾斜角度是否在可控范围内,继而通过自动控制系统防止由于误操作或意外因素造成游车挂、撞猴台。撞猴台。撞猴台。
技术研发人员:孙志刚 夏玉龙 张英栋 徐杰
受保护的技术使用者:濮阳市百福瑞德石油科技有限公司
技术研发日:2020.12.17
技术公布日:2021/9/17
声明:
“石油钻机顶驱或游车防撞井架猴台的无线控制装置的制作方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 1014
编辑:中冶有色技术网
来源:濮阳市百福瑞德石油科技有限公司
1014
编辑:中冶有色技术网
来源:濮阳市百福瑞德石油科技有限公司
 分享 0
分享 0
 举报 0
举报 0
 收藏 0
收藏 0
 反对 0
反对 0
 点赞 0
点赞 0






































































 中冶有色技术平台
中冶有色技术平台

 2024年05月24日 ~ 26日
2024年05月24日 ~ 26日 



 换一批
换一批




