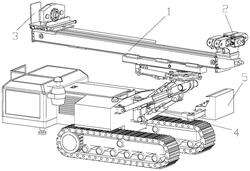
权利要求书: 1.一种自动开孔定位多功能钻机,用于和激光全站仪配合以进行精准钻孔,其特征在于:包括钻机本体(1)、前端测量机构(2)、后端测量机构(3)、行程测量机构(4)和中央控制机构(5);所述前端测量机构(2)包括与钻机本体(1)的钻杆同轴心的激光发射器(22)、用于朝作业面发射激光并将激光位置信息传输给中央控制机构(5);所述后端测量机构(3)包括与钻机本体(1)的钻杆同轴心安装的靶标(32)、用于接收激光全站仪的目标轴线的激光照射并将激光位置信息传输给中央控制机构(5);所述行程测量机构(4)安装于钻机本体(1)的调姿油杆上、用于测量油杆实时行程并将测量数据传输给中央控制机构(5);所述中央控制机构(5)与钻机本体(1)的钻机控制器通信连接、用于在接收前端测量机构(2)和后端测量机构(3)和行程测量机构(4)的数据进行综合分析后制定调姿控制指令并将调姿控制指令传输给钻机控制器以自动精准调整钻机本体(1)的钻孔姿态。
2.根据权利要求1所述的自动开孔定位多功能钻机,其特征在于:所述前端测量机构(2)包括可拆卸地安装于钻机本体(1)前端的前端定位支架(21),所述前端定位支架(21)上安装有激光发射器(22)、前端照相设备(23)和前端通信模块(24),所述前端照相设备(23)用于采集激光发射器(22)的激光图像后通过前端通信模块(24)将采集信息传输给中央控制机构(5)。
3.根据权利要求2所述的自动开孔定位多功能钻机,其特征在于:所述前端定位支架(21)上还设有前端照明设备(25)、用于测量当前光照并适时补光以保证前端照相设备(23)的图像采集。
4.根据权利要求1所述的自动开孔定位多功能钻机,其特征在于:所述前端测量机构(2)包括陀螺仪,所述陀螺仪用于测量钻机本体(1)的实时姿态并将姿态数据传输给中央控制机构(5)。
5.根据权利要求2所述的自动开孔定位多功能钻机,其特征在于:所述前端定位支架(21)上设有多个与钻机本体(1)相配合的定位安装组件、用于使前端定位支架(21)在每次安装时均精准定位以使激光发射器(22)每次均保持与钻机本体(1)的钻杆同轴心。
6.根据权利要求1所述的自动开孔定位多功能钻机,其特征在于:所述后端测量机构(3)包括可拆卸地安装于钻机本体(1)后端的后端定位支架(31),所述后端定位支架(31)上安装有靶标(32)、后端照相设备(33)和后端通信模块(34),所述后端照相设备(33)用于采集靶标(32)上的激光图像后通过后端通信模块(34)将采集信息传输给中央控制机构(5)。
7.根据权利要求6所述的自动开孔定位多功能钻机,其特征在于:所述后端定位支架(31)上还设有后端照明设备(35)、用于测量当前光照并适时补光以保证后端照相设备(33)的图像采集。
8.根据权利要求1所述的自动开孔定位多功能钻机,其特征在于:还包括可对钻机本体(1)进行人工干预控制的人机手持设备,所述人机手持设备和中央控制机构(5)通信连接、用于实时接收中央控制机构(5)的数据以监控钻机本体(1)的实时状态。
9.一种基于权利要求1至8中任意一项所述的自动开孔定位多功能钻机的精准开孔方法,其特征在于:包括以下步骤:
S1、将前端测量机构(2)安装在钻机本体(1)的前端,使得激光发射器(22)与钻机本体(1)的钻杆同轴心;然后使激光发射器(22)朝作业面发射激光并将激光位置信息传输给中央控制机构(5);
S2、将后端测量机构(3)安装在钻机本体(1)的后端,使得靶标(32)与钻机本体(1)的钻杆同轴心以用于指示钻机本体(1)后侧架设的激光全站仪所投射的目标轴线的光斑位置;
然后使激光全站仪朝靶标(32)照射并将激光位置信息传输给中央控制机构(5);
S3、中央控制机构(5)接收前端测量机构(2)、后端测量机构(3)和行程测量机构(4)的数据进行综合分析,然后制定调姿控制指令并将调姿控制指令传输给钻机本体(1)的钻机控制器以精准调整钻机本体(1)的钻孔姿态;
S4、调姿到位后,钻机本体(1)进行精准钻孔作业。
10.根据权利要求9所述的精准开孔方法,其特征在于:所述S1中,在安装前端测量机构(2)之前,使激光全站仪朝作业面发射目标轴线,然后先对钻机本体(1)进行手动调姿,手动粗调到位后再进行如上所述的S1至S3的自动精调。
说明书: 一种自动开孔定位多功能钻机及精准开孔方法技术领域[0001] 本发明主要涉及建筑设备领域,尤其涉及一种自动开孔定位多功能钻机,还涉及一种精准开孔方法。
背景技术[0002] 当今工业施工与城市建设中,多功能钻机是地质勘查和工程施工的重要机械设备,被广泛应用于锚杆护坡、管棚支护、基础加固、地质调查及预报,具有利用率高、机动性
强的特点。
[0003] 目前的多功能钻机在实施定向钻进时,至少需要两人配合:机械操作手依据作业前端观测手的指令反复调整提升、俯仰、摆动与旋转油缸,有时甚至需要来回挪动整车,且
对轴线精度完全依赖于操作手的经验以及与观测手的默契程度。这一施工作业过程存在以
下技术问题:
[0004] 一是当前对轴线精度完全依赖于操作手的经验以及与观测手的默契程度,调整难度大、作业时间长、劳动强度大。
[0005] 二是随着社会的发展,精准施工的要求越来越高。但是上述人工操作和反复调整的方法,使得调整精度得不到保障,开孔容易出现失误,进而严重影响后期的施工、甚至是
建筑的后续稳定性和安全性。
发明内容[0006] 本发明要解决的技术问题是克服现有技术的不足,提供一种结构简单紧凑、操作方便灵活、开孔精度高、大大降低劳动强度和作业时间的一种自动开孔定位多功能钻机,还
提供一种基于该自动开孔定位多功能钻机的精准开孔方法。
[0007] 为解决上述技术问题,本发明采用以下技术方案:[0008] 本发明提供一种自动开孔定位多功能钻机,用于和激光全站仪配合以进行精准钻孔,包括钻机本体、前端测量机构、后端测量机构、行程测量机构和中央控制机构;所述前端
测量机构包括与钻机本体的钻杆同轴心的激光发射器、用于朝作业面发射激光并将激光位
置信息传输给中央控制机构;所述后端测量机构包括与钻机本体的钻杆同轴心安装的靶
标、用于接收激光全站仪的目标轴线的激光照射并将激光位置信息传输给中央控制机构;
所述行程测量机构安装于钻机本体的调姿油杆上、用于测量油杆实时行程并将测量数据传
输给中央控制机构;所述中央控制机构与钻机本体的钻机控制器通信连接、用于在接收前
端测量机构和后端测量机构和行程测量机构的数据进行综合分析后制定调姿控制指令并
将调姿控制指令传输给钻机控制器以自动精准调整钻机本体的钻孔姿态。
[0009] 作为本发明的进一步改进,所述前端测量机构包括可拆卸地安装于钻机本体前端的前端定位支架,所述前端定位支架上安装有激光发射器、前端照相设备和前端通信模块,
所述前端照相设备用于采集激光发射器的激光图像后通过前端通信模块将采集信息传输
给中央控制机构。
[0010] 作为本发明的进一步改进,所述前端定位支架上还设有前端照明设备、用于测量当前光照并适时补光以保证前端照相设备的图像采集。
[0011] 作为本发明的进一步改进,所述前端测量机构包括陀螺仪,所述陀螺仪用于测量钻机本体的实时姿态并将姿态数据传输给中央控制机构。
[0012] 作为本发明的进一步改进,所述前端定位支架上设有多个与钻机本体相配合的定位安装组件、用于使前端定位支架在每次安装时均精准定位以使激光发射器每次均保持与
钻机本体的钻杆同轴心。
[0013] 作为本发明的进一步改进,所述后端测量机构包括可拆卸地安装于钻机本体后端的后端定位支架,所述后端定位支架上安装有靶标、后端照相设备和后端通信模块,所述后
端照相设备用于采集靶标上的激光图像后通过后端通信模块将采集信息传输给中央控制
机构。
[0014] 作为本发明的进一步改进,所述后端定位支架上还设有后端照明设备、用于测量当前光照并适时补光以保证后端照相设备的图像采集。
[0015] 作为本发明的进一步改进,还包括可对钻机本体进行人工干预控制的人机手持设备,所述人机手持设备和中央控制机构通信连接、用于实时接收中央控制机构的数据以监
控钻机本体的实时状态。
[0016] 本发明还提供一种基于上述任意一项所述的自动开孔定位多功能钻机的精准开孔方法,包括以下步骤:
[0017] S1、将前端测量机构安装在钻机本体的前端,使得激光发射器与钻机本体的钻杆同轴心;然后使激光发射器朝作业面发射激光并将激光位置信息传输给中央控制机构;
[0018] S2、将后端测量机构安装在钻机本体的后端,使得靶标与钻机本体的钻杆同轴心以用于指示钻机本体后侧架设的激光全站仪所投射的目标轴线的光斑位置;然后使激光全
站仪朝靶标照射并将激光位置信息传输给中央控制机构;
[0019] S3、中央控制机构接收前端测量机构、后端测量机构和行程测量机构的数据进行综合分析,然后制定调姿控制指令并将调姿控制指令传输给钻机本体的钻机控制器以精准
调整钻机本体的钻孔姿态;
[0020] S4、调姿到位后,钻机本体进行精准钻孔作业。[0021] 作为本发明的进一步改进,所述S1中,在安装前端测量机构之前,使激光全站仪朝作业面发射目标轴线,然后先对钻机本体进行手动调姿,手动粗调到位后再进行如上所述
的S1至S3的自动精调。
[0022] 与现有技术相比,本发明的优点在于:[0023] 一是本发明的自动开孔定位多功能钻机,利用前端的前端测量机构2收集钻机本体1的目前位置和姿态,利用后端测量机构3收集激光全站仪的目标轴线光斑位置信息来明
确钻机本体1应该调姿到位的信息,利用行程测量机构4测量钻机本体1油杆实时行程信息,
再利用中央控制机构5将三者信息综合分析利用后制定调姿控制指令,并将调姿控制指令
传输给钻机控制器,可以实现自动精准调整钻机本体1的钻孔姿态。这一是完全杜绝了现有
技术的依赖操作手的经验以及与观测手进行人工配合的方式,钻机开孔定位调整难度大大
降低,劳动强度小,并且调姿作业时间短,大大提高了工作效率。二是前端测量机构2、后端
测量机构3、行程测量机构4和中央控制机构5相互配合、相互支持,构成了技术功能团,一起
配合使得钻机开孔定位调整精度大大提高,不易出现开孔失误,有效保障了后期的施工、甚
至是建筑的后续稳定性和安全性。三是操作十分灵活、快捷,不需要大规模改造,节约了成
本。因为钻机自身特殊的结构设计和施工环境的限制,使得调姿十分困难,而本发明充分利
用了钻机自有的钻臂来作为安装位,设计了可以分别安装在钻机钻臂前后的前端测量机
构、后端测量机构,能够和架设在钻机本体后侧安全位置的的激光全站仪来配合,加之行程
测量机构和中央控制机构相互配合,进而很好的实现了自动调姿。
[0024] 二是本发明的精准开孔方法,操作方便快捷,调姿作业时间短,大大提高了工作效率,大大降低了劳动强度,并且钻机开孔定位调整精度大大提高,不易出现开孔失误,有效
保障了后期的施工、甚至是建筑的后续稳定性和安全性。
附图说明[0025] 图1是本发明的自动开孔定位多功能钻机在使用时的立体结构原理示意图。[0026] 图2是本发明的前端测量机构的立体结构原理示意图。[0027] 图3是本发明的后端测量机构的立体结构原理示意图。[0028] 图4是本发明的行程测量机构在使用时的结构原理示意图。[0029] 图5是本发明的前端测量机构的构成原理示意图。[0030] 图6是本发明的中央控制机构的构成原理示意图。[0031] 图中各标号表示:[0032] 1、钻机本体;2、前端测量机构;21、前端定位支架;22、激光发射器;23、前端照相设备;24、前端通信模块;25、前端照明设备;3、后端测量机构;31、后端定位支架;32、靶标;33、
后端照相设备;34、后端通信模块;35、后端照明设备;4、行程测量机构;5、中央控制机构。
具体实施方式[0033] 以下将结合说明书附图和具体实施例对本发明做进一步详细说明。[0034] 如图1至图6所示,本发明提供一种自动开孔定位多功能钻机,用于和激光全站仪配合以进行精准钻孔,包括钻机本体1、前端测量机构2、后端测量机构3、行程测量机构4和
中央控制机构5;前端测量机构2包括与钻机本体1的钻杆同轴心的激光发射器22、用于朝作
业面发射激光并将激光位置信息传输给中央控制机构5;后端测量机构3包括与钻机本体1
的钻杆同轴心安装的靶标32、用于接收激光全站仪的目标轴线的激光照射并将激光位置信
息传输给中央控制机构5;行程测量机构4安装于钻机本体1的调姿油杆上、用于测量油杆实
时行程并将测量数据传输给中央控制机构5;中央控制机构5与钻机本体1的钻机控制器通
信连接、用于在接收前端测量机构2和后端测量机构3和行程测量机构4的数据进行综合分
析后制定调姿控制指令并将调姿控制指令传输给钻机控制器以自动精准调整钻机本体1的
钻孔姿态。具体实施原理如下:
[0035] 作业时,可以先将激光全站仪朝作业面发射目标轴线,然后先对钻机本体1进行手动调姿,手动粗调到位后再进行如下的自动精调:首先,在钻机本体1的前端安装好前端测
量机构2,并使得前端测量机构2的激光发射器22与钻机本体1的钻杆同轴心,然后激光发射
器22朝作业面发射激光,前端测量机构2将激光位置信息传输给中央控制机构5。
[0036] 然后,将后端测量机构3安装在钻机本体1的后端(当然,也可以同时安装好前端测量机构2和后端测量机构3),使得后端测量机构3的靶标32与钻机本体1的钻杆同轴心,靶标
32用于指示架设在钻机本体1后侧的激光全站仪所投射的目标轴线的光斑位置;然后打开
激光全站仪,使激光全站仪朝靶标32照射,后端测量机构3将靶标32上的激光位置信息传输
给中央控制机构5;同时,安装于钻机本体1的调姿油杆上的行程测量机构4(也即现有技术
中的位移传感器,其可以通过无线或者有线进行数据传输)测量油杆实时行程并将测量数
据传输给中央控制机构5,为中央控制机构5的计算过程提供依据。在本实施例中,如图4所
示,钻机本体1的每个调姿油杆上均设有一个行程测量机构4。
[0037] 如图6所示:中央控制机构5以工业计算机为核心,搭载了MCU、通讯模块、采集卡和交换机,后端通信模块34也即通讯模块,实现数据获取、姿态控制数据生成和设备自动控制
功能。DC/DC为设备电源调整模块,用于为所有部件提供电源;并且中央控制机构5的工业计
算机搭载了图像处理及自动调整软件,当其采集了来自前端测量机构2和后端测量机构3和
行程测量机构4的数据后,综合分析行成自动调整策略,将策略数据发送给MCU,最终由MCU
形成调姿控制指令,并将形成的调姿控制指令发送给钻机本体1的钻机控制器,由钻机控制
器实现对钻机的自动控制和精确调姿。调姿到位后,取下前端测量机构2和后端测量机构3,
进行精准的开孔作业。通过以上特殊的科学设计,具有如下技术优点:
[0038] 本发明的自动开孔定位多功能钻机,利用前端的前端测量机构2收集钻机本体1的目前位置和姿态,利用后端测量机构3收集激光全站仪的目标轴线光斑位置信息来明确钻
机本体1应该调姿到位的信息,利用行程测量机构4测量钻机本体1油杆实时行程信息,再利
用中央控制机构5将三者信息综合分析利用后制定调姿控制指令,并将调姿控制指令传输
给钻机控制器,可以实现自动精准调整钻机本体1的钻孔姿态。这一是完全杜绝了现有技术
的依赖操作手的经验以及与观测手进行人工配合的方式,钻机开孔定位调整难度大大降
低,劳动强度小,并且调姿作业时间短,大大提高了工作效率。二是前端测量机构2、后端测
量机构3、行程测量机构4和中央控制机构5相互配合、相互支持,构成了技术功能团,一起配
合使得钻机开孔定位调整精度大大提高,不易出现开孔失误,有效保障了后期的施工、甚至
是建筑的后续稳定性和安全性。三是操作十分灵活、快捷,不需要大规模改造,节约了成本。
因为钻机自身特殊的结构设计和施工环境的限制,使得调姿十分困难,而本发明充分利用
了钻机自有的钻臂来作为安装位,设计了可以分别安装在钻机钻臂前后的前端测量机构2、
后端测量机构3,能够和架设在钻机本体1后侧安全位置的的激光全站仪来配合,加之行程
测量机构4和中央控制机构5相互配合,进而很好的实现了自动调姿。
[0039] 进一步,在较佳实施例中,前端测量机构2包括可拆卸地安装于钻机本体1前端的前端定位支架21,前端定位支架21上安装有激光发射器22、前端照相设备23和前端通信模
块24,前端照相设备23用于采集激光发射器22的激光图像后通过前端通信模块24将采集信
息传输给中央控制机构5。在本实施例中,前端定位支架21上还设有前端照明设备25、用于
测量当前光照并适时补光以保证前端照相设备23的图像采集。前端测量机构2包括陀螺仪
(图中未示出),陀螺仪用于测量钻机本体1的实时姿态并将姿态数据传输给中央控制机构
5,为中央控制机构5的计算过程提供依据。在本实施例中,前端测量机构2如图5所示:激光
发射器22与钻机本体1的钻杆同轴心,用于在作业面打出钻臂当前朝向位置;前端通信模块
24也即通讯模块,前端照相设备23采用工业相机,采集前方图像后将数据送往中央控制机
构5的工业计算机,由工业计算机自动处理并判断出光斑所在位置;前端照明设备25也即照
明设备,用于测量当前光照,并根据光照情况对前方进行补光,以保证工业相机可靠工作;
DC/DC为前端测量机构2的设备电源调整模块,用于为所有部件提供电源;MCU形成的数据与
工业相机形成数据均通过工业交换机以有线方式送往中央控制机构5。
[0040] 进一步,在较佳实施例中,前端定位支架21上设有多个与钻机本体1相配合的定位安装组件、用于使前端定位支架21在每次安装时均精准定位以使激光发射器22每次均保持
与钻机本体1的钻杆同轴心。在本实施例中,定位安装组件包括多个开设于前端定位支架21
上的定位孔和定位柱(图中未示出),该定位孔以及定位柱均分别和钻机本体1前端上的安
装孔对应,能够保证每次安装时,都可以快速的使前端定位支架21上的激光发射器22与钻
机本体1的钻杆保持同轴心,不但使得每次的操作方便快捷,而且有效保证了每次调姿的精
准度。
[0041] 进一步,在较佳实施例中,后端测量机构3包括可拆卸地安装于钻机本体1后端的后端定位支架31,后端定位支架31上安装有靶标32、后端照相设备33和后端通信模块34,后
端照相设备33用于采集靶标32上的激光图像后通过后端通信模块34将采集信息传输给中
央控制机构5。在本实施例中,后端定位支架31上还设有后端照明设备35、用于测量当前光
照并适时补光以保证后端照相设备33的图像采集。在本实施例中,后端定位支架31上也设
有多个与钻机本体1相配合的定位安装组件、用于使后端定位支架31在每次安装时均精准
定位以使靶标32的靶心每次均保持与钻机本体1的钻杆同轴心。这不但使得每次的操作方
便快捷,而且有效保证了每次调姿的精准度。
[0042] 进一步,在较佳实施例中,还包括可对钻机本体1进行人工干预控制的人机手持设备,人机手持设备和中央控制机构5通信连接、用于实时接收中央控制机构5的数据以监控
钻机本体1的实时状态。在本实施例中,人机手持设备采用线控方式,为手持设备,能够监视
设备状态、进行系统配置以及实现人工干预,可采用成品HMI实现。
[0043] 本发明还提供一种基于上述任意一项所述自动开孔定位多功能钻机的精准开孔方法,包括以下步骤:
[0044] S1、将前端测量机构2安装在钻机本体1的前端,使得激光发射器22与钻机本体1的钻杆同轴心;然后使激光发射器22朝作业面发射激光并将激光位置信息传输给中央控制机
构5;
[0045] S2、将后端测量机构3安装在钻机本体1的后端(当然,也可以同时安装好前端测量机构2和后端测量机构3),使得靶标32与钻机本体1的钻杆同轴心以用于指示钻机本体1后
侧架设的激光全站仪所投射的目标轴线的光斑位置;然后使激光全站仪朝靶标32照射并将
激光位置信息传输给中央控制机构5;
[0046] S3、中央控制机构5接收前端测量机构2、后端测量机构3和行程测量机构4的数据进行综合分析,然后制定调姿控制指令并将调姿控制指令传输给钻机本体1的钻机控制器
以精准调整钻机本体1的钻孔姿态;
[0047] S4、调姿到位后,钻机本体1进行精准钻孔作业。[0048] 进一步,在较佳实施例中,所述S1中,在安装前端测量机构2之前,使激光全站仪朝作业面发射目标轴线,然后先对钻机本体1进行手动调姿,手动粗调到位后再进行如上所述
的S1至S3的自动精调。
[0049] 虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对
本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是
未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、
等同变化及修饰,均应落在本发明技术方案保护的范围内。
声明:
“自动开孔定位多功能钻机及精准开孔方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 631
编辑:中冶有色技术网
来源:中国人民解放军63653部队
631
编辑:中冶有色技术网
来源:中国人民解放军63653部队
 分享 0
分享 0
 举报 0
举报 0
 收藏 0
收藏 0
 反对 0
反对 0
 点赞 0
点赞 0






































































 中冶有色技术平台
中冶有色技术平台

 2024年05月24日 ~ 26日
2024年05月24日 ~ 26日 



 换一批
换一批




