1.本技术涉及
锂电池加工技术领域,尤其涉及一种刀片锂电池半自动充氦打钉装置。
背景技术:
2.锂电池是目前电动车上最常用的电池种类之一,由于其具有能量密度高、循环使用寿命长等特点迅速占据了绝大部分电动汽车电池市场,因此,锂电池性能的优劣影响着电动汽车的整体性能; 在锂电池的生产工艺中,包括对锂电池进行化成的步骤,化成是提高动力锂电池电器性能的一个十分关键的工序;而在化成工序中,一般需要使用化成螺钉设置于动力锂电池上,以封闭注液口,随着自动化生产的需要,化成螺钉的安装是使用打钉机进行的,无需人手操作。
3.但是,随着科学技术的发展,市场逐渐出现了体积利用率更高的新电池,结构更加扁平的电池,如刀片电池和麒麟电池;而且,由于刀片电池结构(片型偏薄)设计的特点,导致刀片电池在打钉和充氦两个加工步骤的难度变大;现有的打钉机构大多数是由机架、打钉气缸、打钉杆以及打钉头等部件组成,在实际应用中,通过将打钉气缸设置于机架上,利用打钉气缸的输出轴,由打钉杆驱动打钉头对放置于传送带上的锂电池进行打钉操作,虽然实现自动化对电池进行打钉,但是极其容易导致电池壳体的内部出现膨胀和电池的外形出现变形等现象,进而导致电池厚度增加,降低刀片电池的质量,影响刀片电池使用的安全。
4.例如,授权公告号为cn108933297b,专利名称为“一种落地轨道龙门式板材上下料机
”?
的中国发明专利,通过在打钉机构上设置夹爪和打钉头,同时对锂电池进行夹紧以及打钉操作,并在在对锂电池进行打钉时,通过第一驱动装置驱动夹爪夹紧锂电池,然后再通过第二驱动装置驱动打钉杆进而使得打钉头对锂电池进行打钉;在打钉完成后,第二驱动装置线驱动打钉杆退回以便于对打钉头进行备钉,此时第一驱动装置驱动夹爪松开锂电池,虽然实现了自动化对锂电池进行打钉,但是仍然无法克服刀片电池由于自身结构偏薄,充氦工艺和打钉工艺容易使得刀片电池自身结构变形和变厚的难题。
5.因此,如果锂电池的内部和外形出现变形、膨胀变厚等情况,不仅会导致刀片电池打钉口出现密封不良的现象,还会进而导致出现电池性能严重下降、电解液渗漏、电池鼓胀甚至爆炸等严重后果,将会严重影响锂离子电池的使用寿命以及安全性;为此,为保证刀片电池的生产质量,如何在保证电池自身结构不变形的前提下,对刀片电池进行充氦和打钉是目前技术人员需要解决的技术问题。
技术实现要素:
6.为克服相关技术中存在的问题,本技术提供一种刀片锂电池半自动充氦打钉装置,能够实现半自动化地对刀片锂电池的注液口依次进行打钉、充氦和压紧等工艺,并且避免了刀片锂电池在打钉充氦过程中出现内部和外形的变形、膨胀变厚等情况,实现对刀片
锂电池进行安全的加工生产,提高刀片锂电池的生产质量。
7.为实现上述目的,本技术主要采用以下技术方案为一种刀片锂电池半自动充氦打钉装置,包括:三向滑动机构和用于放置刀片锂电池的夹持箱体;该夹持箱体包括有夹持底板、滑动夹板和加工密封面,其中,该加工密封面有且仅有一面,该夹持底板面向该滑动夹板;该加工密封面的正上方设有充氦结构和打钉机构,且该充氦结构和该打钉机构均固定在该三向滑动机构上,由该三向滑动机构控制该充氦结构和该打钉机构的空间位置。
8.优选地,该三向滑动机构包括有z轴滑动机构、y轴滑动机构和x轴滑动机构,该充氦结构和该打钉机构均固定在该z轴滑动机构的第一滑动块上;其中,该z轴滑动机构固定在该y轴滑动机构的第二滑动块上,该y轴滑动机构固定在该x轴滑动机构的第三滑动块上,且该z轴滑动机构的滑动方向与该加工密封面垂直,该y轴滑动机构的滑动方向与该加工密封面平行。
9.优选地,该滑动夹板的一面设有第一玻纤板,另一面设有推压机构,且该第一玻纤板位于该滑动夹板与该夹持底板之间,该夹持底板面向该滑动夹板的一面设有第二玻纤板,其中该推压机构控制该滑动夹板的滑动距离。
10.优选地,该充氦结构包括有直角弯板和充氦接头,该充氦接头通过滑动导杆固定在该直角弯板的一块直板上,且该充氦接头面向该加工密封面,该直角弯板的另一块直板用于与该三向滑动机构固定连接;其中,该充氦接头内设有用于连通氦气的充氦导管,该滑动导杆上设有弹簧。
11.优选地,该打钉机构包括连接支板、推动气缸和打针气缸,该连接支板的一端固定在该推动气缸的动力端上,另一端设有三通导管,该打针气缸固定在该连接支板的一面,该连接支板的另一面用于与该三向滑动机构滑动连接;其中,该三通导管包括有第一端口、第二端口和第三端口,该第一端口对应该加工密封面,该第二端口与该打针气缸的推动顶杆连通,该第三端口用于输入钉针;该第一端口与该第二端口竖直连通,且该第三端口的轴线与该第二端口的轴线夹角为锐角。
12.优选地,该z轴滑动机构包括有第一电机、第一丝杆和安装箱体,其中,该第一丝杆设置在该安装箱体的内部,该第一电机的转轴与该第一丝杆键连接,该第一滑动块固定在该第一丝杆的螺母上,且该安装箱体固定连接在该第二滑动块上。
13.优选地,该y轴滑动机构包括有第二电机、第二丝杆和固定箱体,该第二丝杆设置在该固定箱体的内部,该第二电机的转轴与该第二丝杆键连接,该第二滑动块固定在该第二丝杆的螺母上,且该固定箱体的一端固定连接在该第三滑动块上,另一端与滑动导轨滑动连接。
14.优选地,该y轴滑动机构的下方设置有第一龙门架和第二龙门架,其中该x轴滑动机构固定该第一龙门架的横梁上,该滑动导轨固定在该第二龙门架的横梁上,其中该x轴滑动机构包括有第三电机、第三丝杆和滑动箱体,该第三滑动块固定在该第三丝杆上,该第三丝杆位于该滑动箱体的内部,并与该第三电机的转轴键连接,该第三丝杆的运动方向与该y轴滑动机构的滑动方向垂直。
15.优选地,该夹持箱体还包括有固定直板,该滑动夹板位于该固定直板与该夹持底板之间,且该推压机构固定在该固定直板上;其中,该推压机构包括有推压电缸和滑动导
杆,该滑动夹板固定在该推压电缸的输出端,且该滑动夹板通过该滑动导杆与该固定直板滑动连接,该推压电缸的推动方向与该加工密封面平行。
16.优选地,该z轴滑动机构的末端设有残液收集机构,该残液收集机构包括有残液收集槽和控制气缸,其中该残液收集槽固定在该控制气缸的伸缩杆上,且该残液收集槽的槽口面向该充氦结构和该打钉机构。
17.本技术提供的技术方案可以包括以下有益效果:在本技术中,通过设置三向滑动机构和夹持箱体,并在夹持箱体上设置夹持底板、滑动夹板和加工密封面,将滑动夹板面向夹持底板,并在加工密封面的正上方设置充氦结构和打钉机构,同时将充氦结构和打钉机构固定在能够三个方向移动的三向滑动机构上;然后通过将刀片锂电池放置在夹持箱体的内部,推动滑动夹板将刀片锂电池固定夹紧在夹持底板和滑动夹板之间,并使得刀片锂电池的注液口固定在加工密封面的一面,然后通过三向滑动机构将充氦结构和打钉机构移动到加工密封面的正上方,接着通过三向滑动机构对充氦结构和打钉机构进行多方向移动,依次地对刀片锂电池的注液口进行打钉和充氦,最后压紧钉针,实现对锂电池的注液口进行密封;该刀片锂电池半自动充氦打钉装置能够实现半自动化地对刀片锂电池的注液口依次进行打钉、充氦和压紧等工艺,并且避免了刀片锂电池在打钉充氦过程中出现内部和外形的变形、膨胀变厚等情况,实现对刀片锂电池进行安全的加工生产,提高刀片锂电池的生产质量。
18.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
附图说明
19.通过结合附图对本技术示例性实施方式进行更详细的描述,本技术的上述以及其它目的、特征和优势将变得更加明显,其中,在本技术示例性实施方式中,相同的参考标号通常代表相同部件。
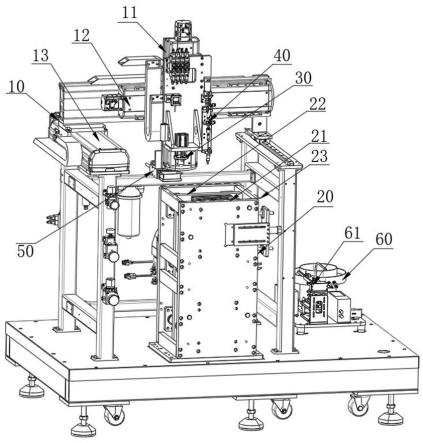
20.图1是本技术实施例示出的刀片锂电池半自动充氦打钉装置的结构示意图;图2是本技术实施例示出的夹持箱体的结构示意图;图3是本技术实施例示出的三向滑动机构的结构示意图;图4是本技术实施例示出的三向滑动机构的另一结构示意图;图中:三向滑动机构10,z轴滑动机构11,第一滑动块111,第一电机112,第一丝杆113,安装箱体114,y轴滑动机构12,第二滑动块121,第二电机122,第二丝杆123,固定箱体124,x轴滑动机构13,第三滑动块131,第三电机132,第三丝杆133,滑动箱体134,滑动导轨14,第一龙门架15,第二龙门架16;夹持箱体20,夹持底板21,滑动夹板22,第一玻纤板221,第二玻纤板222,加工密封面23,推压机构24,推压电缸241,滑动导杆242,固定直板25;充氦结构30,直角弯板31,充氦接头32,滑动导杆33,充氦导管34,弹簧35;所述打钉机构40,连接支板41,推动气缸42,打针气缸43,三通导管44,第一端口441,第二端口442,第三端口443;残液收集机构50,残液收集槽51,控制气缸52;振动盘60,负压吸引器61。
具体实施方式
21.下面将参照附图更详细地描述本技术的优选实施方式。虽然附图中显示了本技术
的优选实施方式,然而应该理解,可以以各种形式实现本技术而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本技术更加透彻和完整,并且能够将本技术的范围完整地传达给本领域的技术人员。
22.在本技术使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本技术。在本技术和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
23.需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者间接在该另一个元件上。当一个元件被称为是“连接于”另一个元件,它可以是直接连接到另一个元件或间接连接至该另一个元件上。
24.在本技术的描述中,需要理解的是,术语“厚度”、“上”、“下”、“前”、“后”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件 必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
25.在本技术的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术中的具体含义。
26.以下结合附图详细描述本技术实施例的技术方案。
27.参见图1至图4,该刀片锂电池半自动充氦打钉装置,包括:三向滑动机构10和用于放置刀片锂电池的夹持箱体20;所述夹持箱体20包括有夹持底板21、滑动夹板22和加工密封面23,其中,所述加工密封面23有且仅有一面,所述夹持底板21面向所述滑动夹板22;所述加工密封面23的正上方设有充氦结构30和打钉机构40,且所述充氦结构30和所述打钉机构40均固定在所述三向滑动机构10上,由所述三向滑动机构10控制所述充氦结构30和所述打钉机构40的空间位置。
28.具体地,所述三向滑动机构10包括有z轴滑动机构11、y轴滑动机构12和x轴滑动机构13,所述充氦结构30和所述打钉机构40均固定在所述z轴滑动机构11的第一滑动块111上;其中,所述z轴滑动机构11固定在所述y轴滑动机构12的第二滑动块121上,所述y轴滑动机构12固定在所述x轴滑动机构13的第三滑动块131上,且所述z轴滑动机构11的滑动方向与所述加工密封面23垂直,所述y轴滑动机构12的滑动方向与所述加工密封面23平行。
29.具体地,所述滑动夹板22的一面设有第一玻纤板221,另一面设有推压机构24,且所述第一玻纤板221位于所述滑动夹板22与所述夹持底板21之间,所述夹持底板21面向所述滑动夹板22的一面设有第二玻纤板222,其中所述推压机构24控制所述滑动夹板22的滑动距离。
30.具体地,所述充氦结构30包括有直角弯板31和充氦接头32,所述充氦接头32通过滑动导杆33固定在所述直角弯板31的一块直板上,且所述充氦接头32面向所述加工密封面23,所述直角弯板31的另一块直板用于与所述三向滑动机构10固定连接;其中,所述充氦接头32内设有用于连通氦气的充氦导管34,所述滑动导杆33上设有弹簧35。
31.具体地,所述打钉机构40包括连接支板41、推动气缸42和打针气缸43,所述连接支板41的一端固定在所述推动气缸42的动力端上,另一端设有三通导管44,所述打针气缸43固定在所述连接支板41的一面,所述连接支板41的另一面用于与所述三向滑动机构10滑动连接;其中,所述三通导管44包括有第一端口441、第二端口442和第三端口443,所述第一端口441对应所述加工密封面23,所述第二端口442与所述打针气缸43的推动顶杆连通,所述第三端口443用于输入钉针;所述第一端口441与所述第二端口442竖直连通,且所述第三端口443的轴线与所述第二端口442的轴线夹角为锐角。
32.具体地,所述z轴滑动机构11包括有第一电机112、第一丝杆113和安装箱体114,其中,所述第一丝杆113设置在所述安装箱体114的内部,所述第一电机112的转轴与所述第一丝杆113键连接,所述第一滑动块111固定在所述第一丝杆113的螺母上,且所述安装箱体114固定连接在所述第二滑动块121上。
33.具体地,所述y轴滑动机构12包括有第二电机122、第二丝杆123和固定箱体124,所述第二丝杆123设置在所述固定箱体124的内部,所述第二电机122的转轴与所述第二丝杆123键连接,所述第二滑动块121固定在所述第二丝杆123的螺母上,且所述固定箱体124的一端固定连接在所述第二滑动块121上,另一端与滑动导轨14滑动连接。
34.具体地,所述y轴滑动机构12的下方设置有第一龙门架15和第二龙门架16,其中所述x轴滑动机构13固定所述第一龙门架15的横梁上,所述滑动导轨14固定在所述第二龙门架16的横梁上,其中所述x轴滑动机构13包括有第三电机132、第三丝杆133和滑动箱体134,所述第三滑动块131固定在所述第三丝杆133上,所述第三丝杆133位于所述滑动箱体134的内部,并与所述第三电机132的转轴键连接,所述第三丝杆133的运动方向与所述y轴滑动机构12的滑动方向垂直。
35.具体地,所述夹持箱体20还包括有固定直板25,所述滑动夹板22位于所述固定直板25与所述夹持底板21之间,且所述推压机构24固定在所述固定直板25上;其中,所述推压机构24包括有推压电缸241和滑动导杆242,所述滑动夹板22固定在所述推压电缸241的输出端,且所述滑动夹板22通过所述滑动导杆242与所述固定直板25滑动连接,所述推压电缸241的推动方向与所述加工密封面23平行。
36.具体地,所述z轴滑动机构11的末端设有残液收集机构50,所述残液收集机构50包括有残液收集槽51和控制气缸52,其中所述残液收集槽51固定在所述控制气缸52的伸缩杆上,且所述残液收集槽51的槽口面向所述充氦结构30和所述打钉机构40。
37.实施例一在本实施例中,为克服刀片锂电池在打钉、充氦和压紧过程中,由于刀片锂电池结构偏薄、单侧施压易变形的原因,以及充氦会导致电池内部增压膨胀的原因,会导致刀片锂电池的内部和外形出现变形、膨胀变厚等情形,最后影响刀片锂电池的质量,降低锂电池的性能;为此,本例为解决上述的问题,通过设置三向滑动机构和夹持箱体,并在夹持箱体上设置夹持底板、滑动夹板和加工密封面,将滑动夹板面向夹持底板,并在加工密封面的正上方设置充氦结构和打钉机构,同时将充氦结构和打钉机构固定在能够三个方向移动的三向滑动机构上,通过夹持箱体夹紧刀片锂电池,对其进行加工处理,在防止锂电池变形变厚的条件下,对电池依次进行打针、充氦和压紧,实现安全地对电池进行加工生产。例如:本例通过将刀片锂电池放置在夹持箱体的内部(即放置在夹持底板与滑动夹板之
间),然后推动滑动夹板将刀片锂电池固定夹紧在夹持底板与滑动夹板之间,实现对刀片电池两个平面进行稳固,防止其发生变形;同时将刀片锂电池的注液口对齐在加工密封面的一面,然后通过三向滑动机构将充氦结构和打钉机构移动到加工密封面的正上方,接着通过三向滑动机构对充氦结构和打钉机构多方向移动,实现依次地对刀片锂电池的注液口进行打钉和充氦,再利用三向滑动机构移动充氦结构对刀片电池进行最后的压紧,将钉针密封在电池的注液口上,从而实现对锂电池的注液口进行密封;该刀片锂电池半自动充氦打钉装置能够实现半自动化地对刀片锂电池的注液口依次进行打钉、充氦和压紧等工艺,并且避免了刀片锂电池在打钉充氦过程中出现内部和外形的变形、膨胀变厚等情况,实现对刀片锂电池进行安全的加工生产,提高刀片锂电池的生产质量。
38.应当说明的是,在上述的实施步骤中,所述三向滑动机构实现三向滑动是指能够在三个方向分别进行运动(即能够在立体空间内对打钉机构和充氦结构进行全方位运动),具体地,所述三向滑动机构是由z轴滑动机构、y轴滑动机构和x轴滑动机构组成,为实现能够在立体空间内进行全方位运动,本例将所述充氦结构和所述打钉机构均固定在所述z轴滑动机构的第一滑动块上,并将充氦结构的头部和打钉机构的头部面向所述夹持箱体的加工密封面,从而使得充氦结构和打钉机构能够在所述加工密封面的竖直方向(即第一方向)进行运动;再具体地,再将所述z轴滑动机构固定在所述y轴滑动机构的第二滑动块上,实现第二方向(横向)的移动,另外再将所述y轴滑动机构固定在所述x轴滑动机构的第三滑动块上,实现第三方向(纵向)的移动,最终实现在立体空间内实现三向移动;还需要提醒的是,本例还需要将所述z轴滑动机构的滑动方向设置成与所述加工密封面垂直,以及将所述y轴滑动机构的滑动方向设置成与所述加工密封面平行,从而实现所有的方向移动均是环绕夹持箱体而进行的;例如:充氦结构和打钉机构均固定在所述z轴滑动机构的第一滑动块上,其中所述z轴滑动机构又固定在所述y轴滑动机构的第二滑动块上,所述y轴滑动机构又固定在所述x轴滑动机构的第三滑动块上,而且所述z轴滑动机构的滑动方向与所述加工密封面垂直,所述y轴滑动机构的滑动方向与所述加工密封面平行,当需要打钉机构对刀片锂电池的注液口进行打钉时,通过调配z轴滑动机构、y轴滑动机构和x轴滑动机构的位置,将打钉机构的头部对齐刀片锂电池的注液口进行打钉,当需要充氦结构对刀片锂电池进行充氦压紧时,同样调整三向滑动机构操作,从而实现多角度、多维度对电池进行充氦和打钉。
39.还应当说明的是,上述提到的打钉机构是由连接支板、推动气缸和打针气缸等部件组成,其中为实现自动对刀片锂电池的注液口进行打钉,本例通过将所述连接支板的一端固定在所述推动气缸的动力端上,并在其另一端设置三通导管(用于输出钉针和打钉),具体地将所述打针气缸固定在所述连接支板的一面,所述连接支板的另一面固定在所述z轴滑动机构的第一滑动块上(也属于三向滑动机构);另外,为能够顺利地将钉针打压到电池的注液口内,本例将所述三通导管设置成有第一端口、第二端口和第三端口的三通接头,具体地将所述第一端口对应所述加工密封面,将所述第二端口与所述打针气缸的推动顶杆进行连通,由打针气缸的推动顶杆推动三通导管内的钉针,通过推动顶杆在第二端口处进行推动,将从第三端口进入的顶针,从第一端口推出压到电池的注液口内,实现对电池的注液口进行打针;值得注意的是,实现上述的效果,需要将所述第一端口与所述第二端口进行竖直连通(即两者的轴线位于同一条竖直线上),使得钉针能够完全由打针气缸进行推压,
而且为了能使得钉针利用重力和负压,从第三端口落入到第一端口的方向,本例还需要将第三端口的轴线与所述第二端口的轴线夹角设置成锐角(小于45
°
),避免钉针卡在三通导管的内部。
40.另外,上述提到的充氦结构具体是由直角弯板和充氦接头等部件组成,其中所述充氦接头是通过滑动导杆固定在所述直角弯板的一块直板上,从而实现充氦接头可滑动,并且将所述充氦接头面向所述加工密封面,实现对刀片锂电池进行充氦和压紧;另外,所述直角弯板的另一块直板是用于与所述三向滑动机构固定连接,即将直角弯板的另一块直板固定在z轴滑动机构的第一滑动块上,通过该z轴滑动机构对该充氦结构和该打钉机构进行控制,实现对充氦结构和打钉机构的移动;具体地,将所述充氦结构固定在所述打钉机构的侧旁,而且充氦结构的充氦接头更接近于所述加工密封平面;其中,为实现充氦接头的充氦、压紧和复原,本例还在充氦接头的内部设有用于连通氦气的充氦导管,以及通过在所述滑动导杆上设置弹簧,通过z轴滑动机构控制充氦结构的位置,实现对刀片锂电池进行压紧、充氦和复原;例如:通过z轴滑动机构控制充氦结构下压,使得充氦接头对齐刀片锂电池的注液口进行下压,同时使得充氦接头能够压紧电池的注液口,然后进行充氦,再通过z轴滑动机构再下压,将钉针压紧密封刀片锂电池的注液口,实现对电池的密封;最后通过z轴滑动机构控制充氦结构上升,充氦接头通过弹簧进行复原。
41.在实际应用中,上述提到的打针、充氦、压紧和复原,具体是依次进行的,且充氦结构的压紧动力是由z轴滑动机构提供的,而打钉机构的动力来源是基于自身内部的推动气缸和打针气缸,因此充氦结构与打钉机构之间的工作是相互配合进行的,即:先通过打钉机构将钉针初步打压到电池的注液口,然后通过充氦结构对电池的内部进行充氦,接着再通过z轴滑动机构控制充氦结构对钉针进行压紧密封,在实现充氦的同时,对电池进行密封。
42.值得注意的是,对于往第三端口进行输入钉针,本例还列举出一个方案,即通过将再设置吸引导管、负压吸引器61和振动盘60,通过将负压吸引器61的负压终端连接第三端口,将吸引导管的一端连通振动盘60的直线送料器连通,将其另一端连通负压吸引器61的负压始端,然后在振动盘60内放置顶针,实现自动化输送钉针到第三端口内。
43.实施例二在本实施例中,为具体化实现实施例一中的技术效果,本将进一步对上述的滑动机构进行描述,以便于理解;具体地,为实现充氦结构和打钉机构的第一方向移动,本例通过将所述z轴滑动机构设置成由第一电机、第一丝杆和安装箱体等部件组成,通过将所述第一丝杆设置在所述安装箱体的内部,然后将所述第一电机的转轴与所述第一丝杆键连接,由第一电机控制丝杆的转动,并且所述第一滑动块固定在所述第一丝杆的螺母上,实现控制第一滑动块的运动,从而实现对安装在第一滑动块上的充氦结构和打钉机构进行控制,而且所述安装箱体是固定连接在所述第二滑动块上的,由第二块滑动块控制整个z轴滑动机构的第二方向运动。
44.具体地,为实现对z轴滑动机构进行控制,本例通过将所述y轴滑动机构设计成由第二电机、第二丝杆和固定箱体等组件组成的整体,将所述第二丝杆设置在所述固定箱体的内部,然后将所述第二电机的转轴与所述第二丝杆进行键连接(与z轴滑动机构的设计类似),并将所述第二滑动块固定在所述第二丝杆的螺母上,实现对第二滑动块进行控制其运
动;另外,由于y轴滑动机构是与所述加工密封面平行的,因此,为保证能够固定整个y轴滑动机构,并且使其进行滑动,从而实现三向运动,本例将所述固定箱体的一端固定连接在所述x轴滑动机构的第三滑动块上,另一端与第二龙门架上的滑动导轨进行滑动连接,实现固定整个y轴滑动机构。
45.具体地,本例通过在所述y轴滑动机构的下方设置第一龙门架和第二龙门架,并将第一龙门架对齐第二龙门架,且保证两者的相互平行;然后将所述x轴滑动机构固定所述第一龙门架的横梁上,并将滑动导轨固定在所述第二龙门架的横梁上;其中,本例中的所述x轴滑动机构是由第三电机、第三丝杆和滑动箱体等部件组成,通过将所述第三滑动块固定在所述第三丝杆上,以及将所述第三丝杆位于所述滑动箱体的内部,并将所述第三丝杆与所述第三电机的转轴进行键连接,同时将所述第三丝杆的运动方向设置成与所述y轴滑动机构的滑动方向进行垂直;实现对整个机构进行控制,实现自动化。
46.综上所述,上述提到的z轴滑动机构、y轴滑动机构和x轴滑动机构实质上是一个联合体,通过与第一龙门架和第二龙门架的相互配合,实现对充氦结构和打钉机构的空间位置进行控制,并实现了三向移动,全方位对充氦结构和打钉机构进行调整。
47.实施例三在本实施例中,为保证刀片锂电池的形状不会发生变化,保证充氦和打钉过程中的安全性,本例还在所述夹持箱体上设置固定直板,通过将所述滑动夹板设置在所述固定直板与所述夹持底板之间,并将所述推压机构固定在所述固定直板上,通过固定直板固定着整个推压机构,以便于整个推压机构能够稳固地发力,实现对滑动夹板的控制,夹持压紧整个刀片锂电池;其中,为实现平稳地推压整块滑动底板,本例在所述推压机构上设置有推压电缸和滑动导杆,并将所述滑动夹板固定在所述推压电缸的输出端,并且将所述滑动夹板通过所述滑动导杆与所述固定直板滑动连接,将滑动导杆分别设置在滑动夹板的四周,以及将所述推压电缸的推动方向设置成与所述加工密封面平行,实现平稳地对整个滑动夹板进行推压。
48.另外,由于在打钉、充氦、压紧过程中,会导致刀片锂电池的内部电解液被挤压溢出,导致整个充氦结构和打钉机构会沾上电解液,影响整个工作环境以及对结构造成损害,因此,本例通过在所述z轴滑动机构的末端设置残液收集机构,通过残液收集机构对溢出的电解液进行收集,解决上述出现的问题;具体地,本例在所述残液收集机构上设有残液收集槽和控制气缸,将所述残液收集槽固定在所述控制气缸的伸缩杆上,并将所述残液收集槽的槽口面向所述充氦结构和所述打钉机构,当完成打钉、充氦、压紧和密封时,z轴滑动机构会升起,然后控制气缸将残液收集槽推出,对残留在充氦结构和打钉机构的上电解液进行回收。
49.还应当说明的是,上述提到电缸,是将伺服电机与丝杠一体化设计的模块化产品,即通过将伺服电机的旋转运动转换成直线运动,同时利用伺服电机最佳优点-精确转速控制,精确转数控制,精确扭矩控制转变成-精确速度控制,精确位置控制,精确推力控制;实现高精度直线运动的产品。
50.振动盘(vibrator bowl)是一种自动组装或自动加工机械的辅助送料设备,简称部品送料装置;振动盘工作原理:变频器、电机、实现自动输送作用;振动盘是一种自动组装或自动加工机械的辅助送料设备;它能把各种产品有序地排列出来,配合自动组装设备将
产品各个部位组装起来成为完整的一个产品,或者配合自动加工机械完成对工件的加工;振动盘料斗下面有个脉冲电磁铁,可以使料斗作垂直方向振动,由倾斜的弹簧片带动料斗绕其垂直轴做扭摆振动;料斗内零件,由于受到这种振动而沿螺旋轨道上升;在上升的过程中经过一系列轨道的筛选或者姿态变化,零件能够按照组装或者加工的要求呈统一状态自动进入组装或者加工位置;其工作目的是通过振动将无序工件自动有序定向排列整齐、准确地输送到下道工序。另外,对于上述提到的负压吸引器是通过一定方法制造其吸引头的负压状态,吸引头外的物质向吸引头挤压,从而完成“吸引”效果的工具。
51.关于上述实施例中的装置,其中各个模块执行操作的具体方式已经在有关该方法的实施例中进行了详细描述,此处将不再做详细阐述说明。
52.上文中已经参考附图详细描述了本技术的方案。在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详细描述的部分,可以参见其他实施例的相关描述。本领域技术人员也应该知悉,说明书中所涉及的动作和模块并不一定是本技术所必须的。 另外,可以理解,本技术实施例方法中的步骤可以根据实际需要进行顺序调整、合并和删减, 本技术实施例装置中的模块可以根据实际需要进行合并、划分和删减。以上已经描述了本技术的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。技术特征:
1.一种刀片锂电池半自动充氦打钉装置,其特征在于,包括:三向滑动机构和用于放置刀片锂电池的夹持箱体;所述夹持箱体包括有夹持底板、滑动夹板和加工密封面,其中,所述加工密封面有且仅有一面,所述夹持底板面向所述滑动夹板;所述加工密封面的正上方设有充氦结构和打钉机构,且所述充氦结构和所述打钉机构均固定在所述三向滑动机构上,由所述三向滑动机构控制所述充氦结构和所述打钉机构的空间位置。2.根据权利要求1所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述三向滑动机构包括有z轴滑动机构、y轴滑动机构和x轴滑动机构,所述充氦结构和所述打钉机构均固定在所述z轴滑动机构的第一滑动块上;其中,所述z轴滑动机构固定在所述y轴滑动机构的第二滑动块上,所述y轴滑动机构固定在所述x轴滑动机构的第三滑动块上,且所述z轴滑动机构的滑动方向与所述加工密封面垂直,所述y轴滑动机构的滑动方向与所述加工密封面平行。3.根据权利要求1所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述滑动夹板的一面设有第一玻纤板,另一面设有推压机构,且所述第一玻纤板位于所述滑动夹板与所述夹持底板之间,所述夹持底板面向所述滑动夹板的一面设有第二玻纤板,其中所述推压机构控制所述滑动夹板的滑动距离。4.根据权利要求1所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述充氦结构包括有直角弯板和充氦接头,所述充氦接头通过滑动导杆固定在所述直角弯板的一块直板上,且所述充氦接头面向所述加工密封面,所述直角弯板的另一块直板用于与所述三向滑动机构固定连接;其中,所述充氦接头内设有用于连通氦气的充氦导管,所述滑动导杆上设有弹簧。5.根据权利要求1所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述打钉机构包括连接支板、推动气缸和打针气缸,所述连接支板的一端固定在所述推动气缸的动力端上,另一端设有三通导管,所述打针气缸固定在所述连接支板的一面,所述连接支板的另一面用于与所述三向滑动机构滑动连接;其中,所述三通导管包括有第一端口、第二端口和第三端口,所述第一端口对应所述加工密封面,所述第二端口与所述打针气缸的推动顶杆连通,所述第三端口用于输入钉针;所述第一端口与所述第二端口竖直连通,且所述第三端口的轴线与所述第二端口的轴线夹角为锐角。6.根据权利要求2所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述z轴滑动机构包括有第一电机、第一丝杆和安装箱体,其中,所述第一丝杆设置在所述安装箱体的内部,所述第一电机的转轴与所述第一丝杆键连接,所述第一滑动块固定在所述第一丝杆的螺母上,且所述安装箱体固定连接在所述第二滑动块上。7.根据权利要求2所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述y轴滑动机构包括有第二电机、第二丝杆和固定箱体,所述第二丝杆设置在所述固定箱体的内部,所述第二电机的转轴与所述第二丝杆键连接,所述第二滑动块固定在所述第二丝杆的螺母上,且所述固定箱体的一端固定连接在所述第三滑动块上,另一端与滑动导轨滑动连接。8.根据权利要求7所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述y轴
滑动机构的下方设置有第一龙门架和第二龙门架,其中所述x轴滑动机构固定所述第一龙门架的横梁上,所述滑动导轨固定在所述第二龙门架的横梁上,其中所述x轴滑动机构包括有第三电机、第三丝杆和滑动箱体,所述第三滑动块固定在所述第三丝杆上,所述第三丝杆位于所述滑动箱体的内部,并与所述第三电机的转轴键连接,所述第三丝杆的运动方向与所述y轴滑动机构的滑动方向垂直。9.根据权利要求3所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述夹持箱体还包括有固定直板,所述滑动夹板位于所述固定直板与所述夹持底板之间,且所述推压机构固定在所述固定直板上;其中,所述推压机构包括有推压电缸和滑动导杆,所述滑动夹板固定在所述推压电缸的输出端,且所述滑动夹板通过所述滑动导杆与所述固定直板滑动连接,所述推压电缸的推动方向与所述加工密封面平行。10.根据权利要求2所述的一种刀片锂电池半自动充氦打钉装置,其特征在于,所述z轴滑动机构的末端设有残液收集机构,所述残液收集机构包括有残液收集槽和控制气缸,其中所述残液收集槽固定在所述控制气缸的伸缩杆上,且所述残液收集槽的槽口面向所述充氦结构和所述打钉机构。
技术总结
本申请锂电池加工技术领域,是关于一种刀片锂电池半自动充氦打钉装置。该装置包括:三向滑动机构和用于放置刀片锂电池的夹持箱体;该夹持箱体包括有夹持底板、滑动夹板和加工密封面,其中,该加工密封面有且仅有一面,该夹持底板面向该滑动夹板;该加工密封面的正上方设有充氦结构和打钉机构,且该充氦结构和该打钉机构均固定在该三向滑动机构上,由该三向滑动机构控制该充氦结构和该打钉机构的空间位置。本申请提供的方案,能够半自动化地对刀片锂电池的注液口依次进行打钉、充氦和压紧等工艺,并且避免了刀片锂电池在打钉充氦过程中出现内部和外形的变形、膨胀变厚等情况,实现对刀片锂电池进行安全的加工生产,提高刀片锂电池的生产质量。的生产质量。的生产质量。
技术研发人员:袁维 肖俊 张良 祝利民
受保护的技术使用者:深圳市铂纳特斯自动化科技有限公司
技术研发日:2022.09.02
技术公布日:2022/10/11
声明:
“刀片锂电池半自动充氦打钉装置的制作方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 670
编辑:中冶有色技术网
来源:深圳市铂纳特斯自动化科技有限公司
670
编辑:中冶有色技术网
来源:深圳市铂纳特斯自动化科技有限公司
 分享 0
分享 0
 举报 0
举报 0
 收藏 0
收藏 0
 反对 0
反对 0
 点赞 0
点赞 0





































































 中冶有色技术平台
中冶有色技术平台

 2024年05月17日 ~ 19日
2024年05月17日 ~ 19日 



 换一批
换一批




