1.本发明涉及
锂电池技术领域,具体涉及锂电池锂盐全自动灌装设备。
背景技术:
2.目前许多锂电池锂盐生产企业的包装工序多采用人工灌装或半自动灌装。当前市场上锂电池原材料尤其锂盐价格昂贵,特别是对于容积较大的吨桶灌装,较高的计量精度显得尤为重要,但市场现有人工灌装或半自动灌装精度较低,对于锂盐制造商来说造成很大的利润损失。
3.其次,很多物料有毒性或者有腐蚀性,需要隔绝空气及水分等。对于长期在此工位操作的工人,容易引起身体疲劳,降低工作效率,从而存在增加了物料与空气接触几率,降低物料品质等缺点,操作上稍有不慎将有较大的职业伤害风险,甚至发生事故,而通过增加人工来降低劳动强度、减少伤害的方式会带来较大的人工成本。
技术实现要素:
4.针对现有技术中存在的上述问题,本发明公开了一种锂电池锂盐全自动灌装设备,其中通过举升移载称重机构和灌装机构的独特设计,使得允许借助简单的激光传感器确定吨桶法兰中心位置,以便方便地将吨桶移载至预设对准位置。而在预设对准位置上,借助创新性的浮动对接单元,允许简单地通过升降气缸的驱动建立封闭的锂盐灌装通道,同时将重量波动的料斗和出料管道与吨桶的称重机构解耦合,使得能够借助设置于吨桶支撑基座上的称重传感器精确地监测到吨桶重量变化,因此无需对现有吨桶支撑基座结构进行改进。此外,通过巧妙地配置干燥氮气通道,使得能够将同样的干燥氮气通道复用于灌装通道的干燥、空气置换、料斗和出料管道与吨桶之间解耦合、以及灌装通道的吹扫等,使系统复杂度得到极大简化。此外,针对锂盐灌装系统的工业应用场景的需求,还提出了一种结构简单且具有高检测精度的皮带状态监测模块,其中通过引入独特且创新的声音识别算法,使得允许基于cnn模型,相对于其他算法以更高的精确性,从皮带输送线现场采集的声音中识别出皮带撕裂事件的发生,由此保证灌装系统运转的安全性和可靠性。
5.具体而言,本发明的锂电池锂盐全自动灌装设备可以包括括皮带输送线、举升移载称重机构和灌装机构;
6.所述皮带输送线用于将吨桶输送至举升移载称重机构;
7.所述举升移载称重机构用于将吨桶移至预设对准位置,并对吨桶进行称重;
8.所述灌装机构用于自动与处于预设对准位置的吨桶法兰进行密封对接,以及将预设重量的锂盐灌装到吨桶内。
9.进一步地,所述皮带输送线中设置有皮带状态监测模块;
10.所述皮带状态监测模块包括沿皮带输送线均匀间隔布置的多个声音采集单元,以及数据处理单元;
11.所述声音采集单元用于收集皮带输送线所在现场的声音信号;
12.所述数据处理单元用于通过信号预处理步骤、特征提取步骤、模型训练步骤和分类识别步骤,根据所述声音信号判断皮带撕裂事件的发生,其中:
13.在所述信号预处理步骤中,依次对声音信号执行预加重子步骤、封装成帧子步骤、加窗子步骤和fft子步骤;
14.所述预加重子步骤用于使声音信号经过高通滤波器,以提高声音信号的高频部分强度;
15.所述封装成帧子步骤用于按照预设帧长,将声音信号分为n个帧信号s(i);
16.所述加窗子步骤用于在帧信号s(i)上加入汉明窗,以生成帧信号s’(i);
17.所述fft子步骤用于逐帧地对帧信号s’(i)进行fft变换,生成声谱信号xi;
18.在所述特征提取步骤中,分别提取声谱信号xi的lfcc特征li和gfcc特征gi;对lfcc特征li和gfcc特征gi进行一阶微分运算以得到一阶微分特征δli和δgi;通过矩阵融合,利用特征li、δli、gi和δgi生成混合特征矩阵hm=[(l1,l2,
…
,ln),(g1,g2,
…
,gn),(δl1,δl2,
…
,δln),(δg1,δg2,
…
,δgn)];利用pca算法对混合特征矩阵hm进行降维运算,得到低维度混合特征;
[0019]
在所述模型训练步骤中,将所述低维度混合特征数据分为训练集数据和测试集数据,通过训练集数据生成和优化cnn网络的参数,生成用cnn模型;
[0020]
在所述分类识别步骤中,利用由模型训练步骤生成的cnn模型,对基于声音信号提取的低维度混合特征进行识别,以判断是否发生皮带撕裂事件。
[0021]
可选地,所述预设帧长为20ms,所述低维度混合特征具有28个维度。
[0022]
进一步地,所述皮带输送线两侧还设有位于举升移载称重机构之前的对射传感器,且被设置成当对射传感器检测到吨桶时减速将吨桶输送至举升移载称重机构。
[0023]
进一步地,所述举升移载称重机构包括基座、承载平台、多个称重传感器、举升气缸、移载x轴和移载y轴;
[0024]
所述移载x轴、移载y轴和举升气缸设置在基座上,分别用于改变承载平台的x、y和z轴位置;
[0025]
所述承载平台用于承载吨桶;
[0026]
所述称重传感器均匀地设置在基座底部,用于获取基座及其承载物的重量;
[0027]
并且,所述举升移载称重机构被设置成,当对射传感器检测到吨桶时,驱动举升气缸、移载x轴和移载y轴,使承载平台与皮带输送线相邻且高度基本平齐。
[0028]
更进一步地,所述灌装机构包括桶口检测单元、浮动对接单元、料斗、螺旋配料机和星形卸料器;
[0029]
所述桶口检测单元用于检测吨桶法兰的中心位置;
[0030]
所述料斗用于选择性地连通螺旋配料机和星形卸料器以接收锂盐,且其输出端连接有出料管道,用于将锂盐从料斗灌装至吨桶内;
[0031]
所述浮动对接单元用于在吨桶法兰与料斗之间形成封闭空间,其中,所述出料管道位于所述封闭空间内;
[0032]
其中,所述桶口检测单元包括激光传感器,且被设置成:
[0033]
当吨桶进入承载平台时,驱动激光传感器沿x轴方向扫描一段距离,使激光传感器的探测激光与吨桶法兰口边沿先后交叉两次以获得第一和第二x轴交叉位置,根据第一和
第二x轴交叉位置计算两个交叉点之间连线的中点坐标,作为吨桶法兰的x轴中心位置x0;
[0034]
使激光传感器的x轴坐标保持在x轴中心位置x0上,驱动激光传感器沿y轴方向扫描一段距离,使激光传感器的探测激光与吨桶法兰口边沿先后交叉两次以获得第一和第二y轴交叉位置,根据第一和第二y轴交叉位置计算两个交叉点之间连线的中点坐标,作为吨桶法兰的y轴中心位置y0;并且,
[0035]
所述举升移载称重机构还被设置成根据所述吨桶法兰的中心位置(x0,y0),借助移载x轴和移载y轴将吨桶移载至预设对准位置。
[0036]
更进一步地,所述浮动对接单元包括升降气缸组件、对接接口和波纹管连接件;
[0037]
所述升降气缸组件用于在吨桶处于预设对准位置时,在垂直方向上移动对接接口以将其压紧在吨桶法兰上,与吨桶法兰形成密封连接;
[0038]
所述对接接口包括一体形成的水平圆环部、圆筒部和用于连接圆环部和圆筒部的连接部;
[0039]
所述水平圆环部被设置成具有大于吨桶法兰外径的外径和略大于吨桶法兰内径的内径,且外端连接升降气缸组件,内侧通过连接部连接圆筒部的上端;其中,所述水平圆环部的下表面形成有密封槽,用于设置密封圈以在对接接口压紧在吨桶法兰上时形成密封结构;
[0040]
所述圆筒部被设置成具有略小于吨桶法兰内径的外径,其中,圆筒部的下端形成有倾斜向外延伸的端面,外侧表面上形成有硅胶层,所述硅胶层的厚度略大于吨桶法兰内径与圆筒部外径之间的差值;
[0041]
所述连接部形成有用于连接水平圆环部的上表面和圆筒部的内侧表面的倾斜表面,以及用于连接水平圆环部的下表面和圆筒部的外侧表面的圆弧表面;
[0042]
所述对接接口的内部还形成有多个气体通道,其分别与形成于圆筒部的内侧表面上的多个气孔形成流体连接;
[0043]
所述波纹管连接件包括波纹管,所述波纹管的一端固定连接于水平圆环部的上表面,另一端与料斗形成固定连接,从而在料斗的输出端和对接接口之间形成封闭空间;
[0044]
所述料斗的出料管道被设置成具有小于圆筒部内径的外径,且允许至少部分插入到吨桶内,其中,所述出料管道的内表面形成有不规则的微结构。
[0045]
可选地,所述料斗上还设置有低频的振动发生器,用于为出料管道提供振动。
[0046]
进一步地,锂电池锂盐全自动灌装设备还可以包括压力可调的干燥氮气源,用于为对接接口内的气体通道提供干燥氮气;
[0047]
所述锂电池锂盐全自动灌装设备被进一步设置成:在所述浮动对接单元与吨桶法兰形成浮动密封连接之后,在向吨桶灌装锂盐之前控制干燥氮气源向对接接口的气体通道输出干燥氮气,以使出料管道和吨桶内的水分含量低于预设值;在向吨桶灌装锂盐过程中,控制干燥氮气源向对接接口的气体通道提供低压的干燥氮气;以及,在停止向吨桶灌装锂盐时,控制干燥氮气源向对接接口的气体通道提供高压的干燥氮气。
[0048]
更进一步地,星形卸料器被设置用于向吨桶灌装锂盐至第一重量预设值,所述螺旋配料机被设置用于在所述吨桶内的锂盐达到第一重量预设值时启动向吨桶灌装锂盐,直至达到第二重量预设值,所述第二重量预设值大于第一重量预设值。
附图说明
[0049]
下面结合附图对本发明的具体实施方式作进一步详细的说明。
[0050]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需使用的附图作简单地介绍,显而易见,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图来获得其他的附图。
[0051]
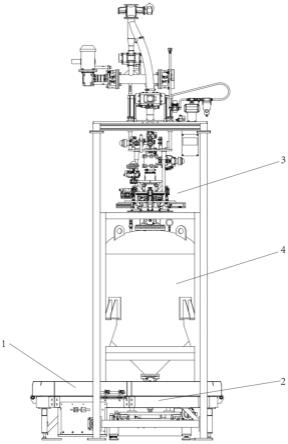
图1示意性地示出了根据本发明的锂电池锂盐全自动灌装设备。
具体实施方式
[0052]
在下文中,本发明的示例性实施例将参照附图来详细描述。下面的实施例以举例的方式提供,以便充分传达本发明的精神给本发明所属领域的技术人员。因此,本发明不限于本文公开的实施例。
[0053]
图1示意性地示出了根据本发明的锂电池锂盐全自动灌装设备,其包括皮带输送线1、举升移载称重机构2和灌装机构3。
[0054]
皮带输送线1用于将吨桶4输送至指定位置,例如,将空吨桶输送至举升移载称重机构2,以及将灌装有锂盐的吨桶4输送至下料位置。由于用于锂盐的吨桶4的容量通常较大,皮带输送线1需要承载较大重量,这使得皮带发生撕裂事件的可能性增大。为消除这种安全隐患,可以在皮带输送线1中设置皮带状态监测模块,用于监测皮带上撕裂事件的发生。
[0055]
现有技术通常借助电磁检测、超声波检测和视觉检测等方式监测撕裂事件的发生,但这些检测方式并不令人满意,例如,电磁检测容易受到异物影响,超声检测容易受到皮带振动或冲击的影响,视觉检测所要求的高图像质量(在工厂环境下)往往难以实现。此外,现有技术还提出声音检测(其采用gmm-ubm模型)和视觉检测相结合的检测方式,但这种检测方式不仅需要复杂的检测结构,且精度也不够高。因此,在本发明中的皮带状态监测模块中,引入一种新的声音检测算法,使得能够以简单的物理配置,即使在复杂工厂环境下也能够获得足够高的检测精度。
[0056]
具体而言,皮带状态监测模块包括沿皮带输送线1均匀间隔布置的多个声音采集单元,以及数据处理单元。
[0057]
声音采集单元用于收集皮带输送线1所在现场的声音信号。
[0058]
数据处理单元用于根据所采集的声音信号,利用声音检测算法识别出皮带撕裂声信号,由此判断是否发生皮带撕裂事件。
[0059]
在本发明的声音检测算法中,需要执行信号预处理步骤、特征提取步骤、模型训练步骤和分类识别步骤。
[0060]
在信号预处理步骤中,依次对声音信号执行预加重子步骤、封装成帧子步骤、加窗子步骤和fft子步骤。
[0061]
预加重子步骤用于使声音信号经过高通滤波器,以提高信号高频部分的强度。
[0062]
作为示例,在高通滤波器中,h(z)=1-u*z-1
,系数u优选在0.9-1.0之间。
[0063]
封装成帧子步骤用于按照预设帧长(其优选为20ms)将声音信号分为n个帧信号s(i),i=1、
…
、n。
[0064]
加窗子步骤用于在声音信号上加入汉明窗(而非矩形窗)以减少频率泄漏。
[0065]
作为示例,经加窗处理后的帧信号s’(i)=s(i)*w(i),w(i)=(1-a)-a*cos[2πn/(i-1)],i为介于0至(n-1)之间的整数,a为系数。
[0066]
fft子步骤用于逐帧地对帧信号s’(i)进行fft变换,获得相应的声谱信号xi。
[0067]
特征提取步骤用于从声谱信号中进行特征提取。其中,分别提取声谱信号xi的lfcc(线性频率倒谱系数)特征li和gfcc(伽玛通频率倒谱系数)特征gi;对所提取的特征li和特征gi进行一阶微分运算以得到一阶微分特征δli和δgi;通过矩阵融合,利用特征li、δli、gi和δgi生成混合特征矩阵hm=[(l1,l2,
…
,ln),(g1,g2,
…
,gn),(δl1,δl2,
…
,δln),(δg1,δg2,
…
,δgn)];再利用pca(principal component analysis)算法对混合特征矩阵hm进行降维运算,得到低维度混合特征。
[0068]
在本发明所获得的混合特征矩阵中,前28个维度即包含了超过98%的信息,因此,优选可以通过pca算法将混合特征矩阵的维度降低为28。
[0069]
通过将本发明的特征提取步骤提取到的特征与其他特征提取算法(例如mfcc、gfcc、mfcc+ifcc、mfcc+δmfcc、gfcc+δgfcc、lfcc+gfcc算法等)相比较,本发明的上述特征提取算法具有最高的特征提取精度,这对于复杂工厂环境中皮带撕裂声音信号的识别尤其有利。
[0070]
模型训练步骤用于将低维度混合特征数据分为训练集数据和测试集数据,通过训练集数据的训练和优化,改进cnn(卷积神经)网络的参数,从而得到用于皮带声音信号的cnn模型。
[0071]
分类识别步骤用于利用所得到的cnn模型,对经信号预处理步骤和特征提取步骤处理的声音信号进行识别,判断皮带上是否发生撕裂事件。
[0072]
皮带输送线1两侧还设有对射传感器,其位于举升移载称重工位之前。因此,当对射传感器检测到吨桶4时,皮带输送线1进行减速,将吨桶4粗略定位在举升移载称重工位上。
[0073]
举升移载称重机构2设置在举升移载称重工位上,包括基座、承载平台、多个称重传感器、举升气缸、移载x轴和移载y轴,其中:移载x轴、移载y轴和举升气缸设置在基座上,分别用于改变承载平台的x、y和z轴位置;承载平台用于承载吨桶4;多个称重传感器均匀地设置在基座底部,用于精确获取基座及其承载物的重量,由此确定吨桶4重量(或其重量变化)。
[0074]
当对射传感器检测到吨桶4时,皮带输送线1减速将吨桶4朝向举升移载称重工位移动,同时借助举升气缸、移载x轴和移载y轴,使承载平台与皮带输送线1接壤且高度基本平齐,以允许皮带输送线1上的吨桶4被移载至承载平台上,由此实现吨桶在举升移载称重工位上的粗略定位。
[0075]
灌装机构3包括桶口检测单元、浮动对接单元、料斗、螺旋配料机和星形卸料器。
[0076]
桶口检测单元包括激光传感器。因此,当吨桶4进入承载平台时,使激光传感器沿x轴方向扫描一段距离,使激光传感器的探测激光与吨桶4的法兰口边沿先后交叉两次以获得第一和第二x轴交叉位置,根据第一和第二x轴交叉位置计算两个交叉点之间连线的中点,作为x轴中间位置,即为吨桶4的x轴中心位置x0。
[0077]
使激光传感器在x轴中心位置上,沿y轴方向扫描一段距离,使激光传感器的探测
激光与吨桶4的法兰口边沿先后交叉两次以获得第一和第二y轴交叉位置,根据第一和第二y轴交叉位置计算两个交叉点之间连线的中点,作为y轴中间位置,即吨桶4y轴中心位置y0。至此,可以确定承载平台上吨桶4的法兰口的中心位置(x0,y0)。因此,根据吨桶法兰口的当前中心位置(x0,y0),可以借助移载x轴和移载y轴将吨桶(法兰口)移载至预设对准位置处。
[0078]
浮动对接单元用于实现处于预设对准位置的吨桶(法兰口)与锂盐灌装管路的浮动对接。
[0079]
浮动对接单元包括升降气缸组件、对接接口和波纹管连接件。
[0080]
升降气缸组件用于在高度方向上移动对接接口,以允许将对接接口压紧在吨桶4的法兰上,以与吨桶法兰形成密封连接。
[0081]
对接接口包括一体形成的水平圆环部、圆筒部和用于连接圆环部和圆筒部的连接部。
[0082]
水平圆环部的外径大于吨桶法兰的外径,内径略大于吨桶法兰的内径。其中,水平圆环部的外端连接升降气缸组件,以便能够借助气缸升降组件在垂直方向上运动;水平圆环部的内侧通过连接部连接中空圆筒部的上端;水平圆环部的下表面上形成有密封槽,用于设置密封圈,以便在对接接口压紧在吨桶法兰上时形成密封结构。
[0083]
连接部上形成有用于连接水平圆环部上表面和中空圆筒部内表面之间的倾斜表面,以及用于连接水平圆环部下表面和中空圆筒部外表面之间的圆弧表面。
[0084]
圆筒部的外径略小于吨桶法兰的内径,其中:圆筒部的下端形成向外倾斜的端面;外表面上形成有硅胶层,硅胶层的厚度略大于吨桶法兰内径与圆筒部外径之差。
[0085]
对接接口内形成有气道,用于与形成于圆筒部内侧表面上的气孔形成流体连接。其中,气道用于连接压力可调的干燥气体源。
[0086]
波纹管连接件包括波纹管,其一端固定连接于水平圆环部的上表面,一端与料斗固定连接,由此在料斗的输出端和对接接口之间提供封闭空间。
[0087]
料斗的输出端连接有出料管道,其外径小于圆筒部内径,以允许至少部分插入到吨桶4内。在本发明中,出料管道的内表面上形成有不规则的微结构,以避免锂盐在管道内发生堵塞。进一步地,料斗上还可以设置有低频的振动发生器,用于为出料管道提供轻微的振动,加速锂盐在管道内的下落运动。
[0088]
下面通过描述锂盐灌装过程以进一步理解借助上述对接接口实现的锂盐灌装通道在精确灌装中的作用。
[0089]
当吨桶4被移动至预设对准位置时,升降气缸组件使对接接口下降并压紧在吨桶法兰上,其中,借助密封槽中的密封圈可以在对接接口与吨桶法兰之间形成密封结构。同时,通过使对接接口的圆筒部的外径小于法兰内径,因此允许吨桶法兰中心位置与对接接口中心位置的对准存在一定的偏差,这使得无需现有技术中用于实现法兰精确对准的复杂结构(例如视觉对准结构),能够简单地借助激光传感器来实现所需要的中心对准功能。此外,借助圆筒部外表面上的硅胶层,不仅可以缓冲对接过程中圆筒部与法兰内表面的冲击,减少对法兰的损伤,同时还能够填充圆筒部与法兰内侧之间的空隙,避免锂盐进入对接接口与法兰之间的空间,从而造成污染,并且,通过在连接部用于连接水平圆环部下表面和中空圆筒部外表面之间形成圆弧表面,可以在连接过程中为受到挤压的硅胶层提供容纳空间,同时充当密封圈作用并提供缓冲作用。波纹管连接件在对接接口与料斗之间提供封闭
空间。料斗输出端的出料管道的外径小于圆筒部内径,因此可以以不接触的方式伸入吨桶4中,其中,通过圆筒部内表面上的气孔可以向出料管道提供水平作用力,以避免出料管道不期望的接触圆筒部。由此可见,通过由波纹管在对接接口和料斗之间的封闭连接,以及出料管道与对接接口的非接触式设置,可以在料斗与对接接口之间形成浮动连接,即,在灌装过程中,重量发生变化的料斗及出料管道并不会作用于举升移载称重机构2上,举升移载称重机构2中称重传感器检测到的重量变化将经由进入吨桶4的锂盐引起。由此可见,本发明可以实现较高的计量精度,其除了依赖于称重传感器的计量精度之外,浮动对接单元将起到关键作用,其能够在保证密封性能的同时可上下自由浮动,其用于形成密封结构施加的锁紧力为内力,不会引起重量计量值的波动。
[0090]
在本发明中,用于连接对接接口中气道的干燥气体源可以为氮气源。因此,可以在对接之后,灌装之前及期间向灌装通道及吨桶4内通入干燥氮气,以进行除湿和氮气置换操作,以保证灌装通道及吨桶4内的水分少于一定含量(例如10ppm)。
[0091]
在进行锂盐灌装时,可以通过开关球阀组件自动打开进料阀门,将灌装通道及吨桶4内的压力泄至常压。
[0092]
星形卸料器用于进行粗精度灌装,并在达到设定值后借助阀门自动关闭星形卸料器与料斗的出料通道,开启螺旋装料器以进行高精度灌装,直至达到设定值后停止进料。
[0093]
在停止进料之后,由干燥气体源通过圆筒部的气孔提供高压氮气气流,以对法兰口和料斗下端的出料管道进行吹扫。
[0094]
然后对接接口断开连接,将吨桶4输送出工位。
[0095]
在本发明所提出的锂电池锂盐全自动灌装设备中,通过举升移载称重机构2和灌装机构3的独特设计,使得允许借助简单的激光传感器确定吨桶法兰中心位置,以便方便地将吨桶4移载至预设对准位置。而在预设对准位置上,借助创新性的浮动对接单元,允许简单地通过升降气缸的驱动建立封闭的锂盐灌装通道,同时将重量波动的料斗和出料管道与吨桶4的称重机构解耦合,使得能够借助设置于吨桶4支撑基座上的称重传感器精确地监测到吨桶4重量变化,因此无需对现有吨桶4支撑基座结构进行改进。此外,通过巧妙地配置干燥氮气通道,使得能够将同样的干燥氮气通道复用于灌装通道的干燥、空气置换、料斗和出料管道与吨桶4之间解耦合、以及灌装通道的吹扫等,使系统复杂度得到极大简化。此外,针对锂盐灌装系统的工业应用场景的需求,还提出了一种结构简单且具有高检测精度的皮带状态监测模块,其中通过引入独特且创新的声音识别算法,使得允许基于cnn模型,相对于其他算法以更高的精确性,从皮带输送线1现场采集的声音中识别出皮带撕裂事件的发生,由此保证灌装系统运转的安全性和可靠性。
[0096]
尽管前面结合附图通过具体实施例对本发明进行了说明,但是,本领域技术人员容易认识到,上述实施例仅仅是示例性的,用于说明本发明的原理,其并不会对本发明的范围造成限制,本领域技术人员可以对上述实施例进行各种组合、修改和等同替换,而不脱离本发明的精神和范围。技术特征:
1.一种锂电池锂盐全自动灌装设备,其包括括皮带输送线1、举升移载称重机构2和举升移载称重机构2;所述皮带输送线1用于将吨桶4输送至举升移载称重机构2;所述举升移载称重机构2用于将吨桶4移至预设对准位置,并对吨桶4进行称重;所述举升移载称重机构2用于自动与处于预设对准位置的吨桶法兰进行密封对接,以及将预设重量的锂盐灌装到吨桶4内。2.如权利要求1所述的锂电池锂盐全自动灌装设备,其中,所述皮带输送线1中设置有皮带状态监测模块;所述皮带状态监测模块包括沿皮带输送线1均匀间隔布置的多个声音采集单元,以及数据处理单元;所述声音采集单元用于收集皮带输送线1所在现场的声音信号;所述数据处理单元用于通过信号预处理步骤、特征提取步骤、模型训练步骤和分类识别步骤,根据所述声音信号判断皮带撕裂事件的发生,其中:在所述信号预处理步骤中,依次对声音信号执行预加重子步骤、封装成帧子步骤、加窗子步骤和fft子步骤;所述预加重子步骤用于使声音信号经过高通滤波器,以提高声音信号的高频部分强度;所述封装成帧子步骤用于按照预设帧长,将声音信号分为n个帧信号s(i);所述加窗子步骤用于在帧信号s(i)上加入汉明窗,以生成帧信号s’(i);所述fft子步骤用于逐帧地对帧信号s’(i)进行fft变换,生成声谱信号x
i
;在所述特征提取步骤中,分别提取声谱信号x
i
的lfcc特征l
i
和gfcc特征g
i
;对lfcc特征l
i
和gfcc特征g
i
进行一阶微分运算以得到一阶微分特征δl
i
和δg
i
;通过矩阵融合,利用特征l
i
、δl
i
、g
i
和δg
i
生成混合特征矩阵hm=[(l1,l2,
…
,l
n
),(g1,g2,
…
,g
n
),(δl1,δl2,
…
,δl
n
),(δg1,δg2,
…
,δg
n
)];利用pca算法对混合特征矩阵hm进行降维运算,得到低维度混合特征;在所述模型训练步骤中,将所述低维度混合特征数据分为训练集数据和测试集数据,通过训练集数据生成和优化cnn网络的参数,生成用cnn模型;在所述分类识别步骤中,利用由模型训练步骤生成的cnn模型,对基于声音信号提取的低维度混合特征进行识别,以判断是否发生皮带撕裂事件。3.如权利要求2所述的锂电池锂盐全自动灌装设备,其中,所述预设帧长为20ms,所述低维度混合特征具有28个维度。4.如权利要求2所述的锂电池锂盐全自动灌装设备,其中,所述皮带输送线1两侧还设有位于举升移载称重机构2之前的对射传感器,且被设置成当对射传感器检测到吨桶4时减速将吨桶4输送至举升移载称重机构2。5.如权利要求1-4中任一项所述的锂电池锂盐全自动灌装设备,其中,所述举升移载称重机构2包括基座、承载平台、多个称重传感器、举升气缸、移载x轴和移载y轴;所述移载x轴、移载y轴和举升气缸设置在基座上,分别用于改变承载平台的x、y和z轴位置;所述承载平台用于承载吨桶4;
所述称重传感器均匀地设置在基座底部,用于获取基座及其承载物的重量;并且,所述举升移载称重机构2被设置成,当对射传感器检测到吨桶4时,驱动举升气缸、移载x轴和移载y轴,使承载平台与皮带输送线1相邻且高度基本平齐。6.如权利要求5所述的锂电池锂盐全自动灌装设备,其中,所述举升移载称重机构223包括桶口检测单元、浮动对接单元、料斗、螺旋配料机和星形卸料器;所述桶口检测单元用于检测吨桶法兰的中心位置;所述料斗用于选择性地连通螺旋配料机和星形卸料器以接收锂盐,且其输出端连接有出料管道,用于将锂盐从料斗灌装至吨桶4内;所述浮动对接单元用于在吨桶法兰与料斗之间形成封闭空间,其中,所述出料管道位于所述封闭空间内;其中,所述桶口检测单元包括激光传感器,且被设置成:当吨桶4进入承载平台时,驱动激光传感器沿x轴方向扫描一段距离,使激光传感器的探测激光与吨桶法兰口边沿先后交叉两次以获得第一和第二x轴交叉位置,根据第一和第二x轴交叉位置计算两个交叉点之间连线的中点坐标,作为吨桶法兰的x轴中心位置x0;使激光传感器的x轴坐标保持在x轴中心位置x0上,驱动激光传感器沿y轴方向扫描一段距离,使激光传感器的探测激光与吨桶法兰口边沿先后交叉两次以获得第一和第二y轴交叉位置,根据第一和第二y轴交叉位置计算两个交叉点之间连线的中点坐标,作为吨桶法兰的y轴中心位置y0;并且,所述举升移载称重机构2还被设置成根据所述吨桶法兰的中心位置(x0,y0),借助移载x轴和移载y轴将吨桶4移载至预设对准位置。7.如权利要求6所述的锂电池锂盐全自动灌装设备,其中,所述浮动对接单元包括升降气缸组件、对接接口和波纹管连接件;所述升降气缸组件用于在吨桶4处于预设对准位置时,在垂直方向上移动对接接口以将其压紧在吨桶法兰上,与吨桶法兰形成密封连接;所述对接接口包括一体形成的水平圆环部、圆筒部和用于连接圆环部和圆筒部的连接部;所述水平圆环部被设置成具有大于吨桶法兰外径的外径和略大于吨桶法兰内径的内径,且外端连接升降气缸组件,内侧通过连接部连接圆筒部的上端;其中,所述水平圆环部的下表面形成有密封槽,用于设置密封圈以在对接接口压紧在吨桶法兰上时形成密封结构;所述圆筒部被设置成具有略小于吨桶法兰内径的外径,其中,圆筒部的下端形成有倾斜向外延伸的端面,外侧表面上形成有硅胶层,所述硅胶层的厚度略大于吨桶法兰内径与圆筒部外径之间的差值;所述连接部形成有用于连接水平圆环部的上表面和圆筒部的内侧表面的倾斜表面,以及用于连接水平圆环部的下表面和圆筒部的外侧表面的圆弧表面;所述对接接口的内部还形成有多个气体通道,其分别与形成于圆筒部的内侧表面上的多个气孔形成流体连接;所述波纹管连接件包括波纹管,所述波纹管的一端固定连接于水平圆环部的上表面,另一端与料斗形成固定连接,从而在料斗的输出端和对接接口之间形成封闭空间;
所述料斗的出料管道被设置成具有小于圆筒部内径的外径,且允许至少部分插入到吨桶4内,其中,所述出料管道的内表面形成有不规则的微结构。8.如权利要求7所述的锂电池锂盐全自动灌装设备,其中,所述料斗上还设置有低频的振动发生器,用于为出料管道提供振动。9.如权利要求7所述的锂电池锂盐全自动灌装设备,其还包括压力可调的干燥氮气源,用于为对接接口内的气体通道提供干燥氮气;所述锂电池锂盐全自动灌装设备被进一步设置成:在所述浮动对接单元与吨桶法兰形成浮动密封连接之后,在向吨桶4灌装锂盐之前控制干燥氮气源向对接接口的气体通道输出干燥氮气,以使出料管道和吨桶4内的水分含量低于预设值;在向吨桶4灌装锂盐过程中,控制干燥氮气源向对接接口的气体通道提供低压的干燥氮气;以及,在停止向吨桶4灌装锂盐时,控制干燥氮气源向对接接口的气体通道提供高压的干燥氮气。10.如权利要求9所述的锂电池锂盐全自动灌装设备,其中,星形卸料器被设置用于向吨桶4灌装锂盐至第一重量预设值,所述螺旋配料机被设置用于在所述吨桶4内的锂盐达到第一重量预设值时启动向吨桶4灌装锂盐,直至达到第二重量预设值,所述第二重量预设值大于第一重量预设值。
技术总结
本发明公开了一种锂电池锂盐全自动灌装设备,其通过独特设计举升移载称重机构和灌装机构,允许借助激光传感器确定吨桶法兰中心位置。借助独特的浮动对接单元,允许借助升降气缸建立封闭锂盐灌装通道,同时将料斗和出料管道与吨桶解耦合,因此可以借助设于吨桶基座上的称重传感器精确监测吨桶重量变化,而无需改进现有基座结构。干燥氮气通道的独特设置,使其能同时复用于灌装通道的干燥、空气置换、出料管道与吨桶的解耦合、灌装通道吹扫等,使系统得到简化。此外,借助独特的声音识别算法,使得能够借助结构简单皮带状态监测模块以高于现有技术的精度,从皮带输送线现场采集的声音中识别出皮带撕裂事件的发生。中识别出皮带撕裂事件的发生。中识别出皮带撕裂事件的发生。
技术研发人员:张文博 李蔡君 王晓松 寇振伟
受保护的技术使用者:宁波格劳博智能工业有限公司
技术研发日:2022.07.19
技术公布日:2022/9/6
声明:
“锂电池锂盐全自动灌装设备的制作方法” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 758
编辑:中冶有色技术网
来源:宁波格劳博智能工业有限公司
758
编辑:中冶有色技术网
来源:宁波格劳博智能工业有限公司
 分享 0
分享 0
 举报 0
举报 0
 收藏 0
收藏 0
 反对 0
反对 0
 点赞 0
点赞 0






































































 中冶有色技术平台
中冶有色技术平台

 2024年05月24日 ~ 26日
2024年05月24日 ~ 26日 



 换一批
换一批




