1.本发明涉及一种多驱动皮带机驱动能力平衡系统及控制方法,属于皮带运输技术领域。
背景技术:
2.长距离的
皮带输送机,其驱动往往采用多点驱动的方式,一般至少在皮带机的机头及机中等位置分别布置多只主动滚筒进行皮带机的驱动。这种多点驱动的皮带机在运行过程中,由于料流大小的变化以及气温,湿度等环境变化等因素,造成皮带在各段的弹性变化不一,各点的驱动力也因此随时发生变化,同一点的驱动功率有时会增大,有时会减小,俗称“出功不出力”。当某一点的驱动功率长时间减小,而皮带机运行负载却没有对应降低的情况下,其它点的驱动功率一会相对地长时间增大,这会造成输出功率大的传动机构振动相对增大,使其对应的驱动设备使用寿命缩短,皮带机运行不稳定。
3.长距离的皮带机点检路线长,一般都是定期巡检,当某处驱动装置异常如振动值超标时,往往不能第一时间被发现和处理,最后小“异常”扩大成大事故。甚至对整条运输流程的正常使用产生不利影响。
技术实现要素:
4.本发明针对现有技术不足,本发明提出一种多驱动皮带机驱动能力平衡系统及控制方法,具备对各点驱动能力平衡的功能,还具有自动检测和预警功能。
5.本发明的技术方案是:一种多驱动皮带机驱动能力平衡系统,包括两组及两组以上的驱动,所述驱动包括主动滚筒和分别在所述主动滚筒两侧对称布置的电机、调速型液力耦合器、减速机、振动
传感器和调速执行机构,所述主动滚筒右侧的第一电机、第一调速型液力耦合器、第一减速机、第一振动传感器和第一调速执行机构组成所述主动滚筒右侧的驱动组合;所述主动滚筒左侧的第二电机、第二调速型液力耦合器、第二减速机、第二振动传感器和第二调速执行机构组成所述主动滚筒左侧的驱动组合。
6.上述技术方案的进一步改进是:所述主动滚筒还连接有速度传感器,所述速度传感器对所述主动滚筒进行速度检测。
7.一种多驱动皮带机驱动能力平衡系统的控制方法,包括两组及两组以上的驱动,包括如下步骤:步骤一:所述皮带机启动运行,并启动a驱动和b驱动;步骤二:所述振动传感器对对应的所述调速型液力耦合器的振动数值进行检测;步骤三:所述速度传感器对所述主动滚筒的转速进行检测;步骤四:进行所述a驱动与b驱动内部的驱动能力平衡调整,在所述驱动a中,所述自动平衡控制器对两只所述振动传感器检测到的振动值中的最大值与设定的起始调节振动值进行比较,若其中某一振动值大于设定的起始调节振动值,则自动平衡控制器控制其对应的调速型液力耦合器的调速执行机构动作,降低所述调速型液力耦合器的输出功率,
减小所述液压耦合器的驱动电机的输出功率,降低所述调速型液力耦合器的振动值;在所述b驱动中,其内部的驱动能力平衡调整的方法与所述a驱动内部的驱动能力平衡调整的方法相同;步骤五:a驱动与b驱动之间的驱动能力平衡调整,对步骤四中,a驱动或b驱动中内部的驱动能力平衡调整后,其振动值仍然较高时,则进行a驱动与b驱动之间的驱动能力平衡调整。
8.上述技术方案的进一步改进是:所述步骤四中,当振动值降低至小于设定的起始调节振动值时,自动平衡控制器停止调节,所述调速型液力耦合器的调速执行机构停止动作,所述速度传感器对所述组驱动的主动滚筒的转速进行检测,若所述调速型液力耦合器的调整执行机构在调整过程中,速度传感器检测到所述组驱动的主动滚筒的转速小于规定转速时,所述调速型液力耦合器的调速执行机构停止调整动作。
9.上述技术方案的进一步改进是:所述步骤五中,a驱动的内部驱动能力调整失败,则自动平衡控制器对b驱动的两套驱动组合进行比较,选择对其中振动传感器检测出的振动值相对小的一套驱动组合进行驱动能力调整,直至其振动值下降至小于设定的起始调节振动值时,a驱动与b驱动之间的驱动能力平衡调整结束。
10.上述技术方案的进一步改进是:所述步骤五中,若调速型液力耦合器的调整执行机构在调整过程中,速度传感器检测到该组驱动的主动滚筒的转速小于规定转速时,所述速型液力耦合器的调速执行机构停止调整。
11.上述技术方案的进一步改进是:所述起始调节振动值设定为报警振动值的70%至80%。
12.上述技术方案的进一步改进是:所述报警振动值设定为6.3mm/s至7.8mm/s。
13.本发明采用上述技术方案的有益效果是:皮带机各段的驱动装置驱动平稳、振动低,具有自动故障检测和预警功能;皮带机各驱动点的驱动能力可以自动分配,皮带机整体运行稳定,驱动设备使用寿命长,故障低、节能环保,有效延长了皮带机系统的整体使用寿命。
附图说明
14.下面结合附图对本发明作进一步说明。
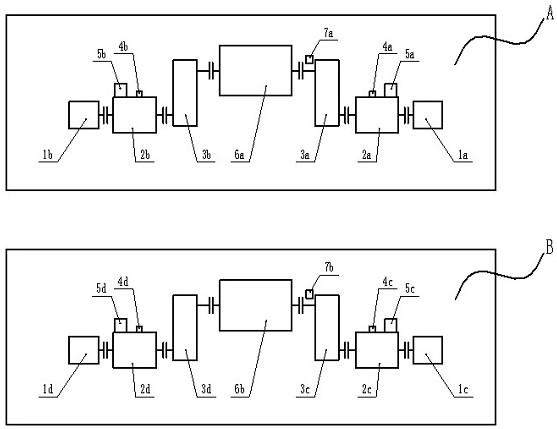
15.图1为本发明实施例的结构示意图;图2为本发明实施例的流程;图中示例:电机1、调速型液力耦合器2、减速机3、振动传感器4、调速执行机构5、主动滚筒6、速度传感器7。
具体实施方式实施例
16.如图1所示,图1是一种多驱动皮带机驱动能力平衡系统的结构示意图。一种多驱动皮带机驱动能力平衡系统的驱动包括两组但不仅限于两组驱动,本实施例中,以两组驱动进行示意,分别包括a驱动和b驱动,其中a驱动包括主动滚筒6a两侧对称布置有电机1a和
1b、调速型液力耦合器2a和2b、减速机3a和3b、振动传感器4a和4b、调速执行机构5a和5b、速度传感器7a。其中电机1a、调速型液力耦合器2a、减速机3a、振动传感器4a、调速执行机构5a组成主动滚筒6a右侧的驱动组合;电机1b、调速型液力耦合器2b、减速机3b、振动传感器4b、调速执行机构5b组成主动滚筒6a左侧的驱动组合,特别地,主动滚筒6a两侧的任意一套驱动组合就可以满足对主动滚筒6a的驱动要求。速度传感器7a对a驱动中主动滚筒6a进行速度检测。
17.b驱动包括主动滚筒6b两侧对称布置有电机1c和1d、调速型液力耦合器2c和2d、减速机3c和3d、振动传感器4c和4d、调速执行机构5c和5d、速度传感器7b。其中电机1c、调速型液力耦合器2c、减速机3c、振动传感器4c、调速执行机构5c组成主动滚筒6b右侧的驱动组合;电机1d、调速型液力耦合器2d、减速机3d、振动传感器4d、调速执行机构5d组成主动滚筒6b左侧的驱动组合,特别地,主动滚筒6b两侧的任意一套驱动组合就可以满足对主动滚筒6a的驱动要求。
18.速度传感器7b对b驱动中主动滚筒6b进行速度检测。
19.本实施例中,a驱动和b驱动包括主动滚筒6a和主动滚筒6b两侧共四套驱动组合。
20.本实施例中,a驱动的两套驱动组合中的任意一套驱动组合加上b驱动的两套驱动组合中的任意一套驱动组合,其合计输出的功率均可以维持皮带机的正常运行;本实施例中,a驱动50%的额定驱动功率加b驱动50%的额定驱动功率,其合计输出的功率可以维持皮带机的正常运行。
21.如图2所示,一种多驱动皮带机驱动能力平衡系统的控制方法的流程图,具体包括如下步骤。
22.步骤一:皮带机启动运行。
23.步骤二:四只振动传感器4分别对对应的调速型液力耦合器2的振动数值进行检测。
24.步骤三:两只速度传感器7分别对两台主动滚筒6的转速进行检测。
25.步骤四:a驱动与b驱动内部的驱动能力平衡调整。
26.在a驱动中,自动平衡控制器对两只振动传感器4检测到的振动值中的最大值与设定的起始调节振动值进行比较,若其中某一振动值大于设定的起始调节振动值,则自动平衡控制器控制其对应的调速型液力耦合器2的调速执行机构5动作,降低该调速型液力耦合器2的输出功率,对应地,可以减小该液压耦合器2的驱动电机1的输出功率,降低该调速型液力耦合器2的振动值。当振动值降低至小于设定的起始调节振动值时,自动平衡控制器停止调节,该调速型液力耦合器2的调速执行机构5停止动作。同时,速度传感器7对该组驱动的主动滚筒6的转速进行检测,若该调速型液力耦合器的调整执行机构在调整过程中,速度传感器7a检测到该组驱动的主动滚筒6a的转速小于规定转速时,该调速型液力耦合器2的调速执行机构5停止调整。即在该自动平衡调节系统中,主动滚筒6的速度控制优先于对调速型液力合器2的振动值调整。
27.例如,振动传感器4a检测出的调速型液力耦合器2a的振动值超出设定的起始调节振动值时,则表示对应地电机1a的输出功率相对大,而与之对称布置的电机1b的输出功率相对小,自动平衡调节系统通控制调速执行机构5a动作,降低调速型液力耦合器2a的输出功率,对应地电机1a的输出功率降低,调速型液力耦合器2a的振动值降低,与之对称布置的
电机1b的输出功率会自动增强。当振动传感器4a检测出的振动值小于设定的起始调节振动值时,调速执行机构5a停止动作。若该调速型液力耦合器2a的调整执行机构5a在调整过程中,速度传感器7a检测到该组驱动的主动滚筒6a的转速小于规定转速时,该调速型液力耦合器2a的调速执行机构5a停止调整。即在该自动平衡调节系统中,主动滚筒6a的速度控制优先于对调速型液力合器2a的振动值调整。
28.同步地,在b驱动中,其内部的驱动能力平衡调整的方法与上述本步骤中a驱动内部的驱动能力平衡调整的方法相同,本实施例不再赘述。
29.步骤五:a驱动与b驱动之间的驱动能力平衡调整。
30.对步骤四中,a驱动或b驱动中内部的驱动能力平衡调整后,其振动值仍然较高时,则自动平衡控制器进行a驱动与b驱动之间的驱动能力平衡调整。例如,步骤4中,a驱动的内部驱动能力调整失败,则自动平衡控制器对b驱动的两套驱动组合进行比较,选择对其中振动传感器4检测出的振动值相对小的一套驱动组合进行驱动能力调整。如b驱动中的振动传感器4d检测出的振动值比振动传感器4c检测出的振动值小,且低于系统设定的起始调节振动值,则自动平衡控制器开始对调速执行机构5d进行调整,提高该调速型液力耦合器2d的输出功率,对应地,可以增加b驱动的整体输出功率,进一步地,a驱动的整体输出功率得到降低,步骤4中,原本a驱动的内部驱动能力调整失败得到改善,直至其振动值下降至小于设定的起始调节振动值时,a驱动与b驱动之间的驱动能力平衡调整结束。
31.同样地,在本步骤实施例中,若调速型液力耦合器5的调整执行机构在调整过程中,速度传感器7检测到该组驱动的主动滚筒6的转速小于规定转速时,该调速型液力耦合器2的调速执行机构5停止调整。即在该自动平衡调节系统中,主动滚筒6的速度控制优先于对调速型液力合器2的振动值调整。
32.起始调节振动值设定为报警振动值的70%至80%。的报警振动值设定为6.3mm/s至7.8mm/s。
33.上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明方法的前提下,还可以做出若干改进和补充,例如将本上述实施例中的两组驱动共计四套驱动组合改为一组或大于两组驱动,共计两套或大于四套驱动组合,这些改进和补充也应视为本发明的保护范围。技术特征:
1.一种多驱动皮带机驱动能力平衡系统,包括两组及两组以上的驱动,其特征在于:所述驱动包括主动滚筒和分别在所述主动滚筒两侧对称布置的电机、调速型液力耦合器、减速机、振动传感器和调速执行机构,所述主动滚筒右侧的第一电机、第一调速型液力耦合器、第一减速机、第一振动传感器和第一调速执行机构组成所述主动滚筒右侧的驱动组合;所述主动滚筒左侧的第二电机、第二调速型液力耦合器、第二减速机、第二振动传感器和第二调速执行机构组成所述主动滚筒左侧的驱动组合。2.根据权利要求1所述的多驱动皮带机驱动能力平衡系统,其特征在于:所述主动滚筒还连接有速度传感器,所述速度传感器对所述主动滚筒进行速度检测。3.一种多驱动皮带机驱动能力平衡系统的控制方法,包括两组及两组以上的驱动,包括如下步骤:步骤一:所述皮带机启动运行,并启动a驱动和b驱动;步骤二:所述振动传感器对对应的所述调速型液力耦合器的振动数值进行检测;步骤三:所述速度传感器对所述主动滚筒的转速进行检测;步骤四:进行所述a驱动与b驱动内部的驱动能力平衡调整,在所述驱动a中,所述自动平衡控制器对两只所述振动传感器检测到的振动值中的最大值与设定的起始调节振动值进行比较,若其中某一振动值大于设定的起始调节振动值,则自动平衡控制器控制其对应的调速型液力耦合器的调速执行机构动作,降低所述调速型液力耦合器的输出功率,减小所述液压耦合器的驱动电机的输出功率,降低所述调速型液力耦合器的振动值;在所述b驱动中,其内部的驱动能力平衡调整的方法与所述a驱动内部的驱动能力平衡调整的方法相同;步骤五:a驱动与b驱动之间的驱动能力平衡调整,对步骤四中,a驱动或b驱动中内部的驱动能力平衡调整后,其振动值仍然较高时,则进行a驱动与b驱动之间的驱动能力平衡调整。4.根据权利要求3所述的多驱动皮带机驱动能力平衡系统的控制方法,其特征在于:所述步骤四中,当振动值降低至小于设定的起始调节振动值时,自动平衡控制器停止调节,所述调速型液力耦合器的调速执行机构停止动作,所述速度传感器对所述组驱动的主动滚筒的转速进行检测,若所述调速型液力耦合器的调整执行机构在调整过程中,速度传感器检测到所述组驱动的主动滚筒的转速小于规定转速时,所述调速型液力耦合器的调速执行机构停止调整动作。5.根据权利要求3所述的多驱动皮带机驱动能力平衡系统的控制方法,其特征在于:所述步骤五中,a驱动的内部驱动能力调整失败,则自动平衡控制器对b驱动的两套驱动组合进行比较,选择对其中振动传感器检测出的振动值相对小的一套驱动组合进行驱动能力调整,直至其振动值下降至小于设定的起始调节振动值时,a驱动与b驱动之间的驱动能力平衡调整结束。6.根据权利要求3所述的多驱动皮带机驱动能力平衡系统的控制方法,其特征在于:所述步骤五中,若调速型液力耦合器的调整执行机构在调整过程中,速度传感器检测到该组驱动的主动滚筒的转速小于规定转速时,所述速型液力耦合器的调速执行机构停止调整。7.根据权利要求3所述的多驱动皮带机驱动能力平衡系统的控制方法,其特征在于:所述起始调节振动值设定为报警振动值的70%至80%。
8.根据权利要求3所述的多驱动皮带机驱动能力平衡系统的控制方法,其特征在于:所述报警振动值设定为6.3mm/s至7.8mm/s。
技术总结
本发明涉及一种多驱动皮带机驱动能力平衡系统及控制方法,属于皮带运输技术领域。本发明包括两组及两组以上的驱动,驱动包括主动滚筒和分别在主动滚筒两侧对称布置的电机、调速型液力耦合器、减速机、振动传感器和调速执行机构。本发明的皮带机各段的驱动装置驱动平稳、振动低,具有自动故障检测和预警功能;皮带机各驱动点的驱动能力可以自动分配,皮带机整体运行稳定,驱动设备使用寿命长,故障低、节能环保,有效延长了皮带机系统的整体使用寿命。有效延长了皮带机系统的整体使用寿命。有效延长了皮带机系统的整体使用寿命。
技术研发人员:贾方俊 孙建福
受保护的技术使用者:上海梅山钢铁股份有限公司
技术研发日:2020.12.04
技术公布日:2022/6/10
声明:
“多驱动皮带机驱动能力平衡系统及控制方法与流程” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 1231
编辑:北方有色网
来源:上海梅山钢铁股份有限公司
1231
编辑:北方有色网
来源:上海梅山钢铁股份有限公司



 咨询细节
咨询细节















































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 




















