全部
▼
热搜:
 1187
1187
 0
0
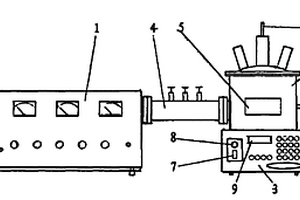
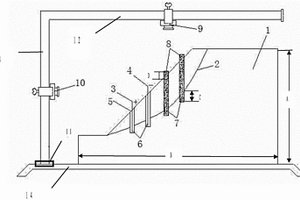
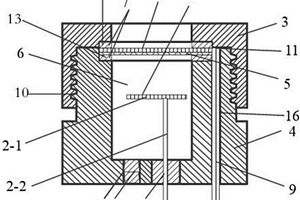
本实用新型温控式微波化学反应系统涉及的是一种以微波作为催化手段,应用于实验室规模的化学反应设备。系统由微波源及波导部分、反应腔、反应腔控制器三部分组成;微波源及波导部分包括微波源操作面板、控制电源、磁控管、环行器、水负载、双定向耦合器、晶体检波器、三螺钉调配器,反应腔具有腔体、腔盖,在腔体内装置有玻璃反应器,腔底装置有调速磁力搅拌器,在腔体壁上设置有视窗、照明窗、微波窗、压缩空气进口,在腔盖上安装有可插入玻璃接管的截止波导,截止波导上装置有屏蔽接头、温度传感器,微波窗与三螺钉调配器相连接;反应腔控制器具有控制器外壳,控制器外壳内上部装置有调速磁搅拌器,调速磁搅拌器输出轴上装置有调速电动机。
 1214
0
1214
0
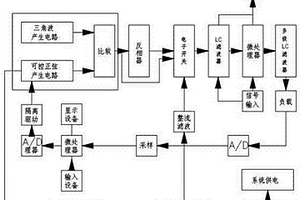
化学仪表安全稳保装置,在化学仪表的供电回路设备输出端接电压采样装置,供电回路通过可控硅电路接化学仪表,接比较器,比较器的两输入端为采样装置的实时电压和额定电压,比较器输出连接微处理器,由微处理器输出连接供电回路的可控硅电路的输入端。在化学仪表的交流电源输入端串入干扰控制器。本实用新型钶在根本上解决了化学仪表由于受到外界(电压、干扰源)等因素而产生测量不稳定的现象。
 907
0
907
0
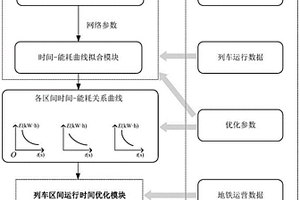
本发明公开了一种基于深度强化学习的城市轨道交通列车时刻表优化方法,具体为:建立基本数据模块;建立列车牵引能耗计算模块,包括神经网络能耗拟合模块与时间‑能耗曲线拟合模块;神经网络能耗拟合模块使用线路数据和列车速度数据作为输入量,使用实测的能耗数据作为期望输出量,经过学习训练,确定与最小误差相对应的网络参数;时间‑能耗曲线拟合模块使用实测速度曲线和训练后的网络,对能耗进行拟合获得时间与能耗的关系曲线;列车区间运行时间优化模块采用深度强化学习算法,综合考虑列车全线能耗、乘客旅行体验和运营管理要求,设计目标函数,通过调整各个区间的运行时间,最大化该目标函数的值。本发明方法具有科学、精确、可靠的优点。
 1109
0
1109
0
本发明公开了一种小分子化学趋向行为的微流控光学观察系统及观察方法。所述的微流控光学观察系统包括光学平台和微流控芯片,以光致化学发光物质为研究对象,通过在低雷诺数流体中构建受体‑配体对的仿真化学梯度场,利用光致化学发光物质的发光特性进行图像采集,观测不同尺度分子和其有序集合的自发定向迁移性能,将受体的运动相态参数与配体的可逆缔合反应信息相关联,结合数理统计,观察分子结合诱导趋化现象。
 1138
0
1138
0
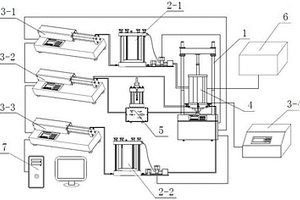
本实用新型公开了一种岩土温度‑渗透‑应力‑化学耦合多功能试验系统,它包括竖向加载装置(1)、化学溶液隔离装置、压力控制装置、压力室(4)、体积变化测定装置(5)、温度控制装置(6)和计算机(7),通过计算机(7)对竖向加载装置(1)、化学溶液隔离装置、压力控制装置、压力室(4)、体积变化测定装置(5)和温度控制装置(6)的控制,完成多种土工试验操作。本实用新型结构设计合理,操作简单,应用范围广,自动化程度高,可实现多种土工试验的全过程自动化控制,稳定性能高,使用寿命长。
 1060
0
1060
0
本发明是一种岩溶隧道排水系统结晶堵塞的化学溶解与清洗疏通方法,岩溶地区隧道工程普遍存在着岩溶结晶阻塞排水系统的问题,给隧道工程的结构安全及其长期运营带来了严重威胁。本发明涉及岩溶隧道排水系统结晶堵塞的化学溶解与清洗疏通方法。本发明采用浓度为2000~2200ppm、重铬酸盐指数为17.71~20%的聚合羧酸类有机酸试剂作为溶解清洗溶剂。其施工步骤分为:堵点电磁探测、溶解清洗管道布置、化学溶解阶段、辅助疏通措施、循环清洗阶段、封堵溶解清洗管道孔。上述溶解清洗溶剂具有绿色环保、且不与水泥基、PVC塑料材料发生化学反应,可有效清除排水系统岩溶结晶物。本发明的施工方法可以有效解决岩溶地区隧道工程普遍存在岩溶结晶堵塞排水系统的问题。
 835
0
835
0
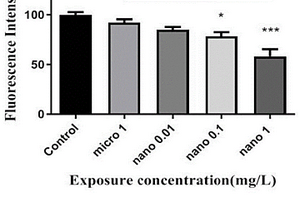
本申请公开了一种利用转基因斑马鱼模型的化学物神经毒性快速筛选方法,包括:(1)本发明选择试验模型为转基因斑马鱼Tg(HuC‑GFP);(2)将所述斑马鱼胚胎在化学物溶液中暴露,在荧光显微镜下观察,所述转基因斑马鱼的胚胎或刚孵化的幼鱼在荧光显微镜下表现为神经元绿色荧光信号减弱,即可判定该化学物溶液具有神经毒性。其优点在于,采用本发明的筛选方法,可以简便、快速地、清晰地观察到模型斑马鱼神经元荧光信号,以此来判断待测化学物溶液,是否具有神经毒性,结果准确、可靠,为后续深入探索化学物神经毒性提供良好的基础。
 935
0
935
0
本实用新型公开了一种基于透明岩体材料的可视化化学电渗法联合桩基加固边坡模型试验装置,其包括透明岩体、试验支架、化学电渗单元和混凝土砂浆,其中,透明岩体用于模拟岩石边坡其中预设1~3条裂缝;试验支架用于支撑透明岩体和架设数码相机;化学电渗单元包括电极和化学溶液,电极包括若干阳电极和阴电极;化学溶液为氯化钙溶液和硅酸钠溶液;混凝土砂浆用于制备模拟模型试验装置中的混凝土桩。该试验装置可以可视化模拟整个化学电渗法联桩基加固边坡施工过程,并且可以观测钻孔、注浆化学反应及灌注混凝土过程与岩体之间的相互作用;且试验装置操作简单,易于实现。
 1032
0
1032
0
本实用新型涉及一种原位紫外薄层电化学池装置,其目的在于解决现有技术中薄层电化学池对三电极体系中电极的限制,利用一般的薄层电极即可完成原位光谱测试。其结构包括:石英比色皿、贮液玻璃瓶、电极组件;石英比色皿位于贮液玻璃瓶下端,电极组件安装在贮液玻璃瓶瓶塞上。石英比色皿底部设有通孔,通孔连接橡胶软管。使用时于上端圆柱石英池中加入电解液,同时用针孔注射器连接下端软管,当抽动活塞时,将电解液引入下方比色皿中,在瓶盖上插入三电极并连接相应工作站,同时将下端比色皿插入紫外卡槽中即可开始测量。将光谱测量池与电化学池分开,解决了维护困难的问题;利用针孔注射器将电解液引入比色皿中,解决电解液流动困难的问题。
 701
0
701
0
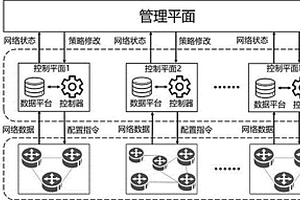
本发明公开了基于深度强化学习的网络智能管控架构系统和运行方法,应用于网络内部的管理控制。其中架构系统由数据平面、控制平面以及管理平面组成。运行方法为:数据平面通过网络遥测技术探测网络中的各类数据,控制平面接收数据平面上传数据,通过深度强化学习技术进行在线决策并下发配置指令,数据平面接收指令对网络内设备进行处理。管理平面根据各分布式控制平面上传的网络状态数据进行学习,并将知识共享到各分布式控制平面。本发明基于深度强化学习技术,可实现网络内部的智能管控,有效提高网络内部资源利用率。
 1127
0
1127
0
本发明公开了一种基于深度强化学习的毫米波通信波束训练方法,该方法通过定义强化学习模型中的状态、目标、奖励等要素在波束训练这一实际问题中的具体表示来对毫米波信道进行追踪;将状态定义为图像的形式,使用卷积神经网络对强化学习中的值函数进行近似,动作定义为基于上一时刻信道最优波束组合的移动方向、距离以及波束覆盖范围的三元组形式;在设计奖励函数时,将一个时间片内有效的数据可达速率作为目标值;在神经网络的训练过程中,使用了Q学习的方法来更新网络参数;利用训练的深度Q网络进行预测,选择Q值最大的动作,该动作对应下一时刻需要测试的波束组合。
 902
0
902
0
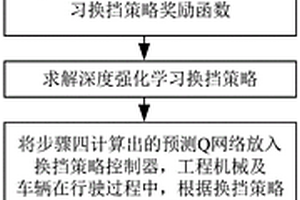
本发明属于工程机械及车辆工程领域,具体涉及一种基于深度强化学习的换挡策略动态优化方法。包括如下步骤:(1):确定换挡策略状态输入变量和动作输出变量;(2):根据状态输入变量和动作输出变量,确定换挡策略马尔科夫决策过程;(3):根据换挡策略目标建立强化学习换挡策略奖励函数;(4):根据马尔科夫决策过程和奖励函数,求解深度强化学习换挡策略;(5):将步骤(4)计算出的预测Q网络放入换挡策略控制器,工程机械及车辆在行驶过程中,工程机械及车辆根据换挡策略控制器选择挡位;(6):在行驶过程中定期更新预测Q网络。本发明通过深度强化学习方法对换挡策略进行更新,实现换挡策略的动态优化。
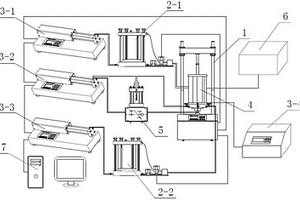
本发明公开了一种岩土温度‑渗透‑应力‑化学耦合多功能试验系统及其操作方法,它包括竖向加载装置(1)、化学溶液隔离装置、压力控制装置、压力室(4)、体积变化测定装置(5)、温度控制装置(6)和计算机(7),通过计算机(7)对竖向加载装置(1)、化学溶液隔离装置、压力控制装置、压力室(4)、体积变化测定装置(5)和温度控制装置(6)的控制,完成多种土工试验操作。本发明结构设计合理,操作简单,应用范围广,自动化程度高,可实现多种土工试验的全过程自动化控制,稳定性能高,使用寿命长。
 1078
0
1078
0
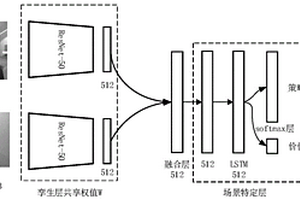
本发明公开了一种基于深度强化学习的智能移动平台无地图自主导航方法,在AI2‑THOR仿真框架中选取导航场景;构建基于Actor‑Critic框架的深度强化学习模型;根据动作概率分布进行移动平台与导航场景的动作交互,更新奖励值和当前观测信息,若当前观测信息与目标图像信息匹配,或达到最大移动步数,或连续采取动作数达到设定步数,则更新模型参数,否则继续动作交互;构建Actor‑Critic网络的损失函数,采用异步优势算法A3C训练更新深度强化学习模型;重复训练,直至训练步数达到设定阈值;获取实际导航场景的初始观测信息与目标图像,利用训练好的模型进行导航,规划智能移动平台的导航路径。本发明无需提前构建环境模型,即可实现显示环境的导航。
 1068
0
1068
0
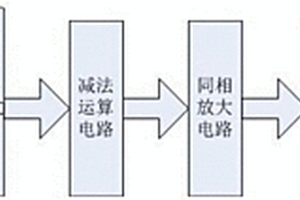
本实用新型公开了一种腐蚀性化学剂温度报警系统,包括测量端、参考端、差分比例运算电路、跟随放大电路、减法运算电路、同相放大电路、单片机报警模块;所述测量端与差分比例运算电路相连,所述参考端与跟随放大电路相连;所述差分比例运算及跟随放大电路输出端与减法运算电路输入端相连;所述减法运算电路通过同相放大电路与单片机报警模块相连。本实用新型提供一种腐蚀性化学剂温度报警系统,实现自动报警,不仅可以直接测量腐蚀性化学剂在生产或实验中温度,而且可以有效减轻自然对流给测量带来的影响,系统整体有着搭建简单、安全性高、测温距离远、制作成本小的优势。
 1185
0
1185
0
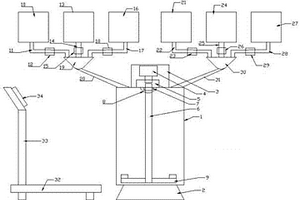
本实用新型属于化学原料制备应用技术领域,具体公开了一种多组份化学液料自动配料装置,由搅拌混合组件、输料组件和控制组件组成。本实用新型的一种多组份化学液料自动配料装置的有益效果在于:1、其设计结构合理,能依据生产需要通过多个输料电磁阀进行快速、精准、自动的加料配料作业,同时能实时对各个贮料仓的料液进行监测,控制驱动电机的工作状态并实现及时的预警和远程的管理如与上位机实现数据的实时输送等,提高了生产和管控效率;2、解决了传统手工配料所存在的安全隐患,且无需打开各个贮料仓进行料液监测,二者都保证了作业人员的身体健康。
 1080
0
1080
0
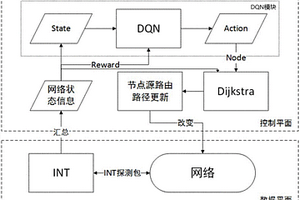
本发明公开了一种基于深度强化学习的网络负载均衡系统及均衡方法,均衡系统包括控制平面和数据平面,控制平面包括INT模块、网络模块,INT模块通过发送探测包获取网络模块中各个节点上的网络信息,并发送给控制平面;控制平面包括DQN模块、网络状态信息模块、最短路径路由算法模块节点源路由路径更新模块,网络状态信息模块接收控制平面发送的网络信息,并发送给DQN模块;DQN模块输出动作调用dijkstra算法模块进行最优路径的计算,并将节点流表的更新结果传递给网络中相应的节点设备。该方案基于P4的INT技术和人工智能中的深度强化学习Deep Q Network模型实现SDN网络的智能负载均衡,从而实现网络资源的合理利用,有效提高网络效率,减少网络中的拥塞。
 1033
0
1033
0
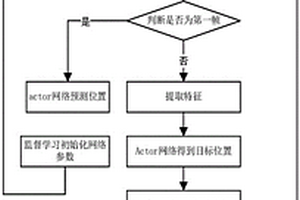
本发明公开了一种基于强化学习算法SAC的目标跟踪方法、装置及存储介质,方法包括:获取视频数据;在视频数据的当前帧中确定搜索区域位置和大小;判断当前帧是否为第一帧;响应于当前帧非第一帧,将当前帧输入预训练好的actor网络模型进行特征提取,得到输出的预测框,根据所述预测框对目标进行跟踪;其中所述actor网络模型的训练方法,包括:通过第一帧对actor、target_actor网络进行初始化,根据经验池中存储的数据,通过actor、critic网络计算动作,计算actor、critic1、critic2网络损失,利用强化学习SAC算法更新网络权值。将目标跟踪问题转化为强化学习算法中在线决策的问题,并且本发明只需要少量数据集,充分利用现有技术,提升训练速度。
 768
0
768
0
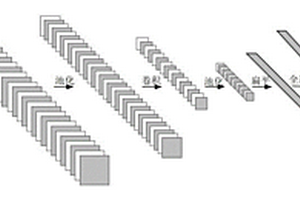
本发明公开了一种基于深度强化学习的车辆自动循迹驾驶方法,包括如下步骤:步骤1、构建双重深度Q网络进行图像特征提取;步骤2、采用经验回放方案进行环境交互训练样本采集和双重网络训练;步骤3、采用RMSprop算法优化网络的训练过程;步骤4、采用训练完毕的双重深度网络进行预测,进而实现自动循迹驾驶。本发明采取深度强化学习方法,直接实现从图像采集到车辆控制的端到端网络建立,避免了传统方法中复杂的PID控制环节,并且采用双重深度网络进行动作预测,可以有效减少单一深度强化学习网络中最大化偏差带来的性能损失。
 847
0
847
0
本发明公开了一种强化学习下的无人机集群雷达通信一体化资源分配方法。涉及的资源主要包括波束、频谱、功率等资源。所述内容包括以下步骤:对无人机集群雷达通信系统进行搭建,分为无人机集群和探测目标群体;构建总性能表征指标,总性能表征指标分别由通信和雷达表征指标按比重合成,通信表征指标是通信率,雷达表征指标是互信息;构建强化学习和深度强化学习;构建相应强化学习和深度强化学习算法;对单个资源进行有效分配,对双资源进行有效分配,对多资源进行有效的分配。本发明提供的方法,能更有效的对无人机集群雷达通信一体化系统进行合理的资源分配,提高资源利用率。
 1048
0
1048
0
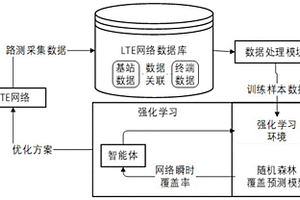
本发明公开了面向蜂窝网络的改进式强化学习网络覆盖优化方法,包括:(1)从异构无线网络环境中采集终端路测数据和基站侧静态数据,处理得到平衡数据集;(2)从平衡数据集中选取一部分数据作为训练集输入到随机森林模型中,对随机森林模型进行训练得到网络覆盖预测模型;(3)设置覆盖优化的目标函数;(4)设置强化学习与网络覆盖优化问题的空间映射,训练强化学习智能体,得到工程参数的调整策略以及覆盖优化结果。本发明方法自动改进优化行为,从而拥有更快的收敛速度,同时能够积累大量运维优化经验并自主形成优化策略,避免了优化过程对网络性能产生较大影响。
 1155
0
1155
0
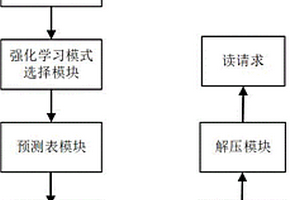
本发明公开了一种基于强化学习的频繁写缓存数据压缩方法,以此更好的解决非易失性缓存中数据压缩存储的问题。包括如下步骤:S1:对于每一次缓存写请求访问操作,将写强度和复用局部性信息记录在数据收集模块;S2:构建强化学习模式选择算法,选择适合压缩的模式,将选择的模式信息记录在预测表中;S3:根据预测表中缓存数据的压缩标志位,如果待写数据适合压缩,则将其压缩后存储在缓存中,下次读取该数据时,根据该信息还原被压缩数据;S4:基于霍夫曼编码的数据压缩算法压缩待存储的数据;S5:返回至步骤S1,继续下一次访问缓存操作,直至该任务执行完毕。本发明所提出的强化学习方法获取频繁写数据,以低功耗的形式压缩存储在非易失性缓存中,提升压缩效率和系统性能。
 676
0
676
0
本发明公开了一种分阶段电化学修复盐侵蚀钢筋混凝土的系统及方法。本发明系统包括修复系统和监测调控系统;修复系统包括电流控制器、迁移液控制器、修复池、废液回收池、2个迁移液池,监测调控系统包括处理器、数据采集器、修复池中的迁移液监测器及钢混结构监测器,修复池中还设有修复电极;处理器分别与电流控制器、数据采集器、迁移液控制器连接,数据采集器分别与迁移液监测器、钢混结构监测器连接,迁移液控制器用以控制溶液进出。本发明修复系统操作简单,维护成本低,既可通过电化学再碱化恢复混凝土的碱性,又可通过双向电迁、电除盐提高侵蚀性离子排除和阻锈剂导入的效率,并实时监控钢筋、混凝土、迁移液状态,提升电化学修复安全性,最终有效延长钢混结构的服役寿命。
 833
0
833
0
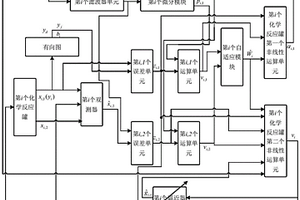
本发明公开了一种多化学反应罐反应液体积一致性控制器系统及设计方法。本发明包括将化学反应罐视为跟随者,其与期望的化学反应罐反应液体积通过通信拓扑图连接成的网络化系统作为被控对象,利用反步法设计自适应控制器,使得化学反应罐的反应液体积跟踪领导者的参考反应液体积。本发明在系统中考虑了随机项,通过利用伊藤引理处理随机多智能体系统中的求导问题;设计状态观测器,基于系统输信号设计状态观测器来估计系统状态考虑输入饱和环节;采用神经网络逼近饱和函数中的未知数;在控制律中增加附加项,避免奇异现象;采用动态面方法,可减少复杂求导过程。
 873
0
873
0
本发明公开了一种低速轻载电化学摩擦试验机,解决的技术问题:针对背景技术中提及的传统摩擦学仪器存在摩擦磨损速度很快且不适合从事腐蚀磨损机理方面的研究工作的技术缺陷。采取的技术方案,一种低速轻载电化学摩擦试验机,包括用于实现升降机构在最高位置与最低位置之间转变的快速升降机构,设置在快速升降机构内部的用于带动上试样做圆周运动实现摩擦试验测试的旋转机构,与旋转机构相连的用于给上试样加载法向负载的法向力加载机构,位于法向力加载机构下方的试样平台和固定在试验机底板上的传感器测试模组。本发明的有益效果是:本低速轻载电化学摩擦试验机,可开展低速、轻载荷下的电化学摩擦实验。
 822
0
822
0
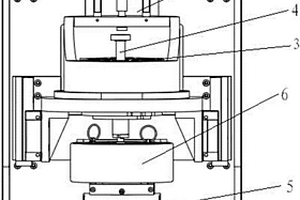
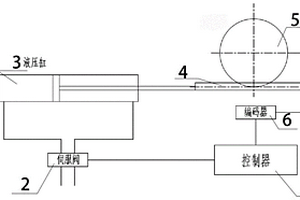
本发明公开了一种基于状态与扰动估计的物料转送器强化学习控制方法,首先建立物料转送器电液伺服系统的控制模型;然后采用一种新型的非线性扩张状态观测器估计液压伺服系统未知状态和等效扰动,该非线性扩张状态观测器理论上的估计误差为零;基于上述状态和等效扰动估计,设计滑模控制器实现液压伺服系统快速、高精度控制;最后采用强化学习方法,通过系统自适应学习对滑模控制器参数进行在线自适应学习,提高液压伺服系统的控制性能。本发明能够根据液压伺服系统位置信息得到其他状态和扰动信息;能够通过强化学习方法实现控制滑模控制器参数自整定,不需要人工大量的实验进行整定,降低了工作量,提高了控制精度。
 826
0
826
0
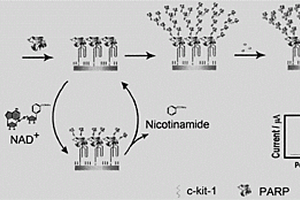
本发明属于分析化学技术领域,涉及一种多聚腺苷二磷酸核糖聚合酶(PARP)的检测方法及其应用。本发明主要是利用经典巯基自组装的方式将能够与PARP特异结合的单链DNA(c-kit-1)修饰于金电极表面,经处理使c-kit-1形成四聚体构型;与PARP孵育后,加入该酶特定的催化底物尼克酰胺腺嘌呤二核苷酸(NAD),即可促使PARP自催化产生一条带有高负电荷的聚腺苷二磷酸核糖(PAR);利用PAR的负电荷吸附带正电荷的电信号分子六氨合钌(RuHex),通过电分析方法对电极表面吸附的RuHex进行定量,通过电化学信号与PARP浓度的关系,绘制标准曲线,通过测量待测样品的电化学信号,通过计算即可实现PARP的灵敏检测。该方法具有好的重复性,高的灵敏度,可应用于PARP及其抑制剂3-氨基苯甲酰胺(3-AB)的检测。
 999
0
999
0
本申请提供了一种基于深度强化学习的机器人自主寻源方法及装置。所述方法包括:建立放射源计数衰减模型和放射源计数分布模型;基于实际环境,建立寻源模拟环境,所述寻源模拟环境包括探测器、放射源和屏蔽物;基于所述放射源计数衰减模型和放射源计数分布模型,利用所述探测器在所述寻源模拟环境中沿着不同路径测量不同位置的所述放射源的放射性活度,并依据价值函数,确定探测器在每个状态下,不同动作对应的价值函数值,多次训练后以建立深度强化学习模型;基于所述深度强化学习模型,在实际环境中找到放射源。
 1081
0
1081
0
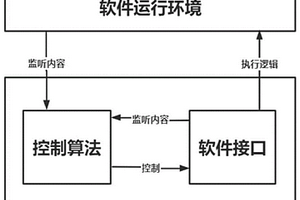
本发明提出了一种基于深度强化学习的软件智能升级方法及装置。所述方法包括:采集软件运行参数以及用户操作参数,并确定所述软件运行参数以及用户操作参数下软件的基准升级时间点;根据所述软件运行参数以及用户操作参数,利用策略网络给出预测的升级时间点,将预测的升级时间点和所述基准升级时间点的差值作为强化学习的奖励,并将奖励作为策略网络的标签值,通过训练得到训练好的软件智能升级模型;获取软件实时运行参数和用户操作参数,传入训练好的软件智能升级模型,得到当前升级时间点的可信值,并根据可信值判断是否进行升级。本发明基于强化学习和深度学习,实现软件系统的智能升级时机预测,极大地提高软件升级效率。
 769
0
769
0
本发明提供一种电化学pH传感器,以饱和KCl溶液为电解液,溶液中含有大量离子,可以使pH传感器内阻更小,导电性能更优;Ag/AgCl参比电极为圆丁状,其圆片电极相比针状可以有效增大电极与微液膜接触面积,使pH传感器灵敏度更好;RuO2‑TiO2复合H+敏感电极为环片状,与普通电极结构相比,可以有效提高微液膜中H+与电极接触面积,增加传感通道,从而提高传感器的灵敏度,更好的对飞行器进行腐蚀监测;并且,本发明提供的电化学pH传感器形状为圆柱形,较传统长条笔状电极更易安放在飞行器表面,进而对海上高盐高湿环境下飞行器表面进行腐蚀监测。
中冶有色为您提供最新的江苏南京有色金属分析检测技术理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!


 2025年07月09日 ~ 11日
2025年07月09日 ~ 11日  2025年07月11日 ~ 13日
2025年07月11日 ~ 13日  2025年07月16日 ~ 18日
2025年07月16日 ~ 18日  2025年07月16日 ~ 18日
2025年07月16日 ~ 18日  2025年07月17日 ~ 19日
2025年07月17日 ~ 19日 









































































