1.本发明涉及露天矿生产技术领域,具体涉及一种露天矿一次破碎站无人值守系统及控制方法。
背景技术:
2.在露天矿的实际生产过程中,往往在一次破碎站生产环节存在异地分布、分散控制,环境恶劣、人员占比高、现场就地调频及人工计算车辆计数等复杂问题,从而直接影响翻煤效率、经济效益、人身健康,而目前露天矿破碎站生产环节缺少自动化生产综合管理系统,使实际的生产效率、紧急效益及人员安全管理控制滞后,缺少成体系的一次破碎站无人值守自动化运行的控制管理,不能满足露天矿智能化生产发展的要求。
3.专利申请cn202123015614.1公开的破碎站料位智能控制装置,包括破碎站主体、输送辊带以及进料口,所述输送辊带安装于破碎站主体上,所述进料口安装于输送辊带的一端上,所述进料口上设有料位智能控制机构;该破碎站料位智能控制装置,在现有的破碎站的进料系统上设置了具有储存中转物料性质的进料斗,并且配合检测组件检测料位的高点和低点,依靠配合料位智能控制机构在物料较多时实现物料的分流和物料的补料,提高设备运行的稳定性以及连续性,避免物料堆积造成设备的堵塞和损坏。但该专利申请为机械硬件单架构组成,在复杂的工况下,难以实现一次破碎站设备远程流畅控制,解决露天矿一次破碎站无人值守自动化运行的问题。
技术实现要素:
4.为了克服上述现有技术的缺点,本发明的目的在于提供一种露天矿一次破碎站无人值守系统及控制方法,通过料位监测、车辆识别、车辆自动计数等相关控制点,程序联动实现一次破碎站设备远程流畅控制,解决露天矿一次破碎站无人值守自动化运行的问题,提高煤场的自动化控制管理水平,实现了智能自动控制,工作安全性提升、生产效率、经济效益显著提高。
5.为了实现上述目的,本发明采取的技术方案是:
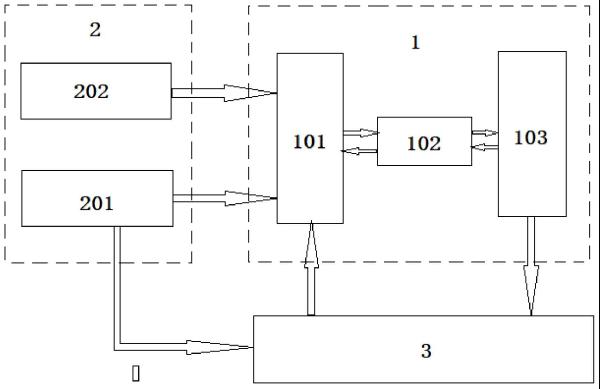
6.一种露天矿一次破碎站无人值守系统,包括就地控制模块1,所述就地控制模块1的信号输入端分别与料位实时监测模块2、翻煤信号指示模块3的信号输出端相连接,进行指令下达;就地控制模块1的信号输出端分别与料位实时监测模块2、翻煤信号指示模块3的信号输入端相连接,接受实时数据反馈;料位实时监测模块2与翻煤信号指示模块3双向信号连接。
7.所述就地控制模块1包括一次破碎站端就地中央控制单元101、远控中央控制单元103,所述一次破碎站端就地中央控制单元101及远控端中央控制单元103之间通过远程就地切换单元102双向信号连接。
8.所述一次破碎站端就地中央控制单元101采用罗克韦尔或西门子控制系列模块,所述远控端中央控制单元103采用罗克韦尔系列控制模块。
9.所述一次破碎站端就地中央控制单元101内置料位实时监测连锁翻煤程序、车辆检测装置、柔性生产调配程序及翻煤车数自动统计程序。
10.所述料位实时监测模块2包括料仓料位监测器201及破碎仓料位监测器202,进行实时料位监测;料仓料位监测器201停机时对初始料仓测量高度及空仓料位高度进行采集,生产时对包括料仓前后物料堆积高度、分布是否均匀的信号进行采集,作为基础数据传递至通过远程就地控制模块1,控制翻煤信号指示模块3的翻煤指示变化、刮板机频率的自主调节。
11.所述料仓料位监测器201及破碎仓料位监测器202均采用雷达监测料位变化。
12.所述料位实时监测连锁翻煤程序通过采集翻煤信号指示模块3信号,同料仓料位监测器201及料位参数设定形成自主闭环管理,从而控制及提升翻煤效率。
13.所述柔性生产调配程序根据破碎仓料位监测器202生产过程中实时采集破碎仓料位变化数据,通过远程就地控制模块1作为基础数据传递至程控逻辑中,同系统内设定的料高降频频率进行比较,作为刮板机频率自主调节的参考数据,进一步影响翻煤指示变化,及时处理破碎仓料位堆积。
14.所述翻煤车数自动统计程序通过翻煤信号指示模块3的变化频率及次数累加得出每班次或某一时间段具体的物料倒运车数,进行计数统计数量不设上限设定。
15.所述翻煤信号指示模块3采用ds-tmg03a雷达触发装置,通过采集料位计实时监测物料高度、空仓高度,车辆识别程序检测到物料平台车位存有车辆到位情况、物料倒运对位情况,控制模块内信号灯逻辑变换。
16.一种露天矿一次破碎站无人值守控制方法,具体包括以下步骤:
17.步骤1、准备工作:通过远端中央控制单元103根据一次破碎站料仓料位高度、破碎仓降频料位及料高降频频率设定翻煤信号指示模块3变化规则;
18.步骤2、设备启机:操作人员通过远控端中央控制单元103确认各设备处于就绪状态,一次破碎站发出启机指令,设备整体联动;集控人员可通过远控端中央控制单元103组态界面查看刮板频率反馈、刮板机及
破碎机电流、系统备妥状态、料仓料位、破碎仓料位信号判断系统启停、运行是否正常;待设备全部启动且检查正常后可进行组织生产;
19.步骤3、自动生产:自动翻煤模式下,操作人员通过远控端中央控制单元103将翻煤信号指示模块3控制切换为自动模式;车辆检测装置检测到车位有车情况下,分别对设定的不同料位翻煤信号指示模块3延时0-60秒进行倒计时,倒计时结束后,根据翻煤信号指示模块3的信号指示,指导车辆开始翻煤生产,对角翻煤或者同侧翻煤,严禁对向翻煤,过程中如料仓料位实时值高于设定翻煤信号指示变化的料位值,表示料仓内物料超过最佳生产料位,系统自动立即中断循环翻煤,翻煤信号指示延时设定时间是防止车辆快速翻煤引发料仓内大量物料堆积的手段,并在远控端中央控制单元103中实时显示;
20.步骤4、柔性生产:针对生产过程中,物料较大导致破碎机无法及时破除进一步引发破碎仓频繁堵料的问题,破碎仓料位监测器202通过实时监测破碎仓料位高度,并实时反馈至系统料高指示;当破碎仓料位监测器202监测料位高于设定降频料位时,远控端中央控制单元103将自主下达降频指令至现场一次破碎站系统,并赋予料高降频低设定值,立即降低重型刮板机传输物料频率,防止破碎仓物料堆积更加严重,至一次破碎站重型
给料机自主恢复至原频率生产;
21.步骤5、手动模式生产:当车辆检测装置出现故障,无法检测到车位上存有车辆时将无法进行系统自动指导翻煤生产;远控端中央控制单元103操作员可将车位翻煤信号指示模块3切换按钮打至手动档位,通过对每个车位翻煤信号指示模块3手动操作或双对角车位翻煤信号指示模块3手动操作,结合料位监测反馈数据进行人为翻煤手动模式生产;手动模式生产过程中,柔性生产调配程序依旧保持;
22.步骤6、系统停车:一次破碎站系统停机分为系统停车和紧急停车,远控端中央控制单元103操作员按联锁启动的逆顺序,进行系统停车二逐一停机;发生以下情况时,通过手动急停按钮进行紧急停机,并向上级汇报:
23.1)发现有铁块、火煤等杂物进入料仓;
24.2)发现破碎站设备电流异常增高、强烈振动等异常情况;
25.3)设备损坏损毁的突发事件。
26.本发明的有益效果为:
27.1、本发明通过就地控制模块1控制一次破碎站,利用料位实时监测模块2、翻煤信号指示模块3,捕捉、收集、转化模拟人员观测参数,控制流程可实现一次破碎站无人值守,实时掌握现场各类设备在线参数数据、稳定且有序控制物料倒运过程,排除生产安全隐患,提升人员对一次破碎站的管理运行效率。
28.2、本发明采用模块化设计,通过就地控制模块1集中操控各一次破碎站生产,打破现有多破碎生产过程中存在的异地分布、分散控制,环境恶劣、人员占比高、现场就地调频及人工计算车辆计数等复杂问题。逻辑互锁控制红绿灯的指示,从而错开式翻煤,保持刮板料流均匀平稳,具有符合普遍现有一次破碎站生产过程需求,可复用性高,灵活度强等优点。
29.3、本发明料仓料位监测器201及破碎仓料位监测器202均采用雷达监测料位变化情况,可选定监测介质类型,调节反馈回波数据、输出映射、物料趋势及仿真内容可优化调节回波曲线,准确估算料仓料位分布情况,监测实时变化的料位结合实时可更新翻煤料仓位置深度设定,从而留有充分时间处理大料流,避免压死现象产生,根据调整经验可设定调整时长,自动恢复至原频率生产,保障了生产效率高效稳定输出。
附图说明
30.图1是本发明的系统流程示意图。
31.图中:1、就地控制模块;2、料位实时监测模块;3、翻煤信号指示模块;101、一次破碎站端就地中央控制单元;102、远程就地切换单元;103、远控中央控制单元;201、料仓料位监测器;202、碎仓料位监测器。
具体实施方式
32.本发明不局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本技术相同或相似的技术方案,均落在本发明的保护范围之内。
33.以下结合附图对本发明做进一步详细描述。
34.参见图1,一种露天矿一次破碎站无人值守系统,包括就地控制模块1,所述就地控
制模块1的信号输入端分别与料位实时监测模块2、翻煤信号指示模块3的信号输出端相连接,并进行指令下达;就地控制模块1的信号输出端分别与料位实时监测模块2、翻煤信号指示模块3的信号输入端相连接,并接受实时数据反馈;料位实时监测模块2与翻煤信号指示模块3双向信号连接。
35.所述就地控制模块1包括一次破碎站端就地中央控制单元101、远控中央控制单元103,所述一次破碎站端就地中央控制单元101及远控端中央控制单元103之间通过远程就地切换单元102双向信号连接。
36.所述一次破碎站端就地中央控制单元101采用罗克韦尔或西门子控制系列模块,所述远控端中央控制单元103采用罗克韦尔系列控制模块。
37.所述一次破碎站端就地中央控制单元101内置料位实时监测连锁翻煤程序、车辆检测装置、柔性生产调配程序及翻煤车数自动统计程序。
38.所述料位实时监测模块2包括料仓料位监测器201及破碎仓料位监测器202;针对固体式物料且生产环境较为复杂的区域进行实时料位监测;料仓料位监测器201停机时,对初始料仓测量高度及空仓料位高度进行采集,生产时,对包括料仓前后物料堆积高度、分布是否均匀的信号进行采集,作为基础数据传递至通过远程就地控制模块1,控制翻煤信号指示模块3的翻煤指示变化、刮板机频率的自主调节。
39.所述料仓料位监测器201及破碎仓料位监测器202均采用雷达监测料位变化。
40.所述料位实时监测连锁翻煤程序通过采集翻煤信号指示模块3信号,同料仓料位监测器201及料位参数设定,形成自主闭环管理,从而控制及提升翻煤效率。
41.所述柔性生产调配程序根据破碎仓料位监测器202生产过程中实时采集破碎仓料位变化数据,通过远程就地控制模块1作为基础数据传递至程控逻辑中,同系统内设定的料高降频频率进行比较,作为刮板机频率自主调节的重要基础参考数据,进一步影响翻煤指示变化,及时处理破碎仓料位堆积。
42.所述翻煤车数自动统计程序通过翻煤信号指示模块3的变化频率及次数累加得出每班次或某一时间段具体的物料倒运车数,进行计数统计数量不设上限设定。
43.所述翻煤信号指示模块3采用ds-tmg03a雷达触发装置,通过采集料仓料位监测器201及破碎仓料位监测器202实时监测物料高度、空仓高度;通过车辆检测装置检测到物料平台车位存有车辆到位情况、物料倒运对位情况,控制模块内信号灯逻辑变换,分辨率更高,检测更稳定。
44.一种露天矿一次破碎站无人值守控制方法,具体包括以下步骤:
45.步骤1、准备工作:通过远端中央控制单元103根据一次破碎站料仓料位高度、破碎仓降频料位及料高降频频率设定翻煤信号指示模块3变化规则;
46.步骤2、设备启机:操作人员通过远控端中央控制单元103确认各设备处于就绪状态,一次破碎站发出启机指令,设备整体联动;集控人员通过远控端中央控制单元103组态界面刮板频率反馈、刮板机及破碎机电流、系统备妥状态、料仓料位、破碎仓料位等信号判断系统启停、运行是否正常,待设备全部启动且检查正常后可进行组织生产;
47.步骤3、自动生产:自动翻煤模式下,操作人员通过远控端中央控制单元103将翻煤信号指示模块3控制切换为自动模式;车辆检测装置检测到车位有车情况下,分别对设定的不同料位翻煤信号指示模块3延时0-60秒进行倒计时,倒计时结束后,根据翻煤信号指示模
块3的信号指示,指导车辆开始翻煤生产,对角翻煤或者同侧翻煤,严禁对向翻煤;生产过程中,如料仓料位实时值高于设定翻煤信号指示变化的料位值,表示料仓内物料超过最佳生产料位,系统自动立即中断循环翻煤,翻煤信号指示延时设定时间是防止车辆快速翻煤引发料仓内大量物料堆积的手段,并在远控端中央控制单元103中实时显示;
48.步骤4、柔性生产:针对生产过程中,物料较大导致破碎机无法及时破除进一步引发破碎仓频繁堵料的问题,破碎仓料位监测器202通过实时监测破碎仓料位高度可实时反馈至系统料高指示;当破碎仓料位监测器202监测料位高于设定降频料位时,远控端中央控制单元103自主下达降频指令至现场一次破碎站系统,并赋予料高降频较低设定值,立即降低重型传输物料频率,防止破碎仓物料堆积更加严重,至一次破碎站自主恢复至原频率生产;
49.步骤5、手动模式生产:当车辆检测装置出现故障,无法检测到车位上存有车辆时,将无法进行系统自动指导翻煤生产;远控端中央控制单元103操作员可将车位翻煤信号指示模块3切换按钮打至手动档位,通过对每个车位翻煤信号指示模块3手动操作或双对角车位翻煤信号指示模块3手动操作,结合料位监测反馈数据进行人为翻煤手动模式生产;手动模式生产过程中,柔性生产调配程序依旧保持;
50.步骤6、系统停车:一次破碎站系统停机分为系统停车和紧急停车,远控端中央控制单元103操作员按联锁启动的逆顺序,进行系统停车二逐一停机;发生以下情况时,通过手动急停按钮进行紧急停机,并向上级汇报:
51.1)发现有铁块、火煤等杂物进入料仓;
52.2)发现破碎站设备电流异常增高、强烈振动等异常情况;
53.3)设备损坏损毁的突发事件。
54.本发明通过就地控制模块1控制管理一次破碎站无人值守工作,利用就地控制模块1与料位实时监测模块2、翻煤信号指示模块3信号通讯,捕捉、收集、转化模拟人员观测参数,控制流程可实现一次破碎站无人值守,实时掌握现场各类设备在线参数数据、稳定且有序控制物料倒运过程,排除生产安全隐患,提升人员对一次破碎站的管理运行效率。
55.另外,本发明采用模块化设计,通过就地控制模块1集中操控各一次破碎站生产,打破现有多破碎生产过程中存在的异地分布、分散控制、环境恶劣、人员占比高、现场就地调频及人工计算车辆计数等复杂问题;逻辑互锁控制翻煤信号的指示,从而错开式翻煤,保持刮板料流均匀平稳,具有符合普遍现有一次破碎站生产过程需求,可复用性高,灵活度强等优点。技术特征:
1.一种露天矿一次破碎站无人值守系统,包括就地控制模块(1),其特征在于:所述就地控制模块(1)的信号输入端分别与料位实时监测模块(2)、翻煤信号指示模块(3)的信号输出端相连接,并进行指令下达;就地控制模块(1)的信号输出端分别与料位实时监测模块(2)、翻煤信号指示模块(3)的信号输入端相连接,并接受实时数据反馈;料位实时监测模块(2)与翻煤信号指示模块(3)双向信号连接。2.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述就地控制模块(1)包括一次破碎站端就地中央控制单元(101)、远控中央控制单元(103),所述一次破碎站端就地中央控制单元(101)及远控端中央控制单元(103)之间通过远程就地切换单元(102)双向信号连接;所述一次破碎站端就地中央控制单元(101)采用罗克韦尔或西门子控制系列模块,远控端中央控制单元(103)采用罗克韦尔系列控制模块。3.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述一次破碎站端就地中央控制单元(101)内置料位实时监测连锁翻煤程序、车辆检测装置、柔性生产调配程序及翻煤车数自动统计程序。4.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述料位实时监测模块(2)包括料仓料位监测器(201)及破碎仓料位监测器(202),进行实时料位监测;料仓料位监测器(201)停机时对初始料仓测量高度及空仓料位高度进行采集,生产时对包括料仓前后物料堆积高度、分布是否均匀的信号进行采集,作为基础数据传递至通过远程就地控制模块(1),控制翻煤信号指示模块(3)的翻煤指示变化、刮板机频率的自主调节。5.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述料仓料位监测器(201)及破碎仓料位监测器(202)采用雷达监测料位变化。6.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述料位实时监测连锁翻煤程序通过采集翻煤信号指示模块(3)信号,同料仓料位监测器(201)及料位参数设定形成自主闭环管理,从而控制及提升翻煤效率。7.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述柔性生产调配程序根据破碎仓料位监测器(202)生产过程中实时采集破碎仓料位变化数据,通过远程就地控制模块1作为基础数据传递至程控逻辑中,同系统内设定的料高降频频率进行比较,作为刮板机频率自主调节的参考数据,进一步影响翻煤指示变化,及时处理破碎仓料位堆积。8.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述翻煤车数自动统计程序通过翻煤信号指示模块(3)的变化频率及次数累加得出每班次或某一时间段具体的物料倒运车数,进行计数统计数量不设上限设定。9.根据权利要求1所述的一种露天矿一次破碎站无人值守系统,其特征在于:所述翻煤信号指示模块(3)采用ds-tmg03a雷达触发装置,通过采集采集料仓料位监测器201及破碎仓料位监测器202实时监测物料高度、空仓高度;通过车辆检测装置检测到物料平台车位存有车辆到位情况、物料倒运对位情况,控制模块内信号灯逻辑变换。10.一种露天矿一次破碎站无人值守控制方法,其特征在于:具体包括以下步骤:步骤1、准备工作:通过远端中央控制单元(103)根据一次破碎站料仓料位高度、破碎仓降频料位及料高降频频率设定翻煤信号指示模块(3)变化规则;
步骤2、设备启机:操作人员通过远控端中央控制单元(103)确认各设备处于就绪状态,一次破碎站发出启机指令,设备整体联动;集控人员可通过远控端中央控制单元(103)组态界面查看刮板频率反馈、刮板机及破碎机电流、系统备妥状态、料仓料位、破碎仓料位信号判断系统启停、运行是否正常;待设备全部启动且检查正常后进行组织生产;步骤3、自动生产:自动翻煤模式下,操作人员通过远控端中央控制单元(103)将翻煤信号指示模块(3)控制切换为自动模式;车辆检测装置检测到车位有车情况下,分别对设定的不同料位翻煤信号指示模块(3)延时0-60秒进行倒计时,倒计时结束后,根据翻煤信号指示模块(3)的信号指示,指导车辆开始翻煤生产,对角翻煤或者同侧翻煤,严禁对向翻煤;生产过程中,如料仓料位实时值高于设定翻煤信号指示变化的料位值,表示料仓内物料超过最佳生产料位,系统自动立即中断循环翻煤,翻煤信号指示延时设定时间是防止车辆快速翻煤引发料仓内大量物料堆积的手段,并在远控端中央控制单元(103)中实时显示;步骤4、柔性生产:针对生产过程中,物料较大导致破碎机无法及时破除进一步引发破碎仓频繁堵料的问题,破碎仓料位监测器(202)通过实时监测破碎仓料位高度,并实时反馈至系统料高指示;当破碎仓料位监测器(202)监测料位高于设定降频料位时,远控端中央控制单元(103)将自主下达降频指令至现场一次破碎站系统,并赋予料高降频低设定值,立即降低重型刮板机传输物料频率,防止破碎仓物料堆积更加严重,至一次破碎站重型给料机自主恢复至原频率生产;步骤5、手动模式生产:当车辆检测装置出现故障,无法检测到车位上存有车辆时将无法进行系统自动指导翻煤生产;远控端中央控制单元(103)操作员可将车位翻煤信号指示模块(3)切换按钮打至手动档位,通过对每个车位翻煤信号指示模块(3)手动操作或双对角车位翻煤信号指示模块(3)手动操作,结合料位监测反馈数据进行人为翻煤手动模式生产;手动模式生产过程中,柔性生产调配程序依旧保持;步骤6、系统停车:一次破碎站系统停机分为系统停车和紧急停车,远控端中央控制单元(103)操作员按联锁启动的逆顺序,进行系统停车二逐一停机;发生以下情况时,通过手动急停按钮进行紧急停机,并向上级汇报:1)发现有铁块、火煤等杂物进入料仓;2)发现破碎站设备电流异常增高、强烈振动等异常情况;3)设备损坏损毁的突发事件。
技术总结
一种露天矿一次破碎站无人值守系统及控制方法,其系统包括就地控制模块,所述就地控制模块的信号输入端分别与料位实时监测模块、翻煤信号指示模块的信号输出端相连接,并进行指令下达;就地控制模块的信号输出端分别与料位实时监测模块、翻煤信号指示模块的信号输入端相连接,并接受实时数据反馈;料位实时监测模块与翻煤信号指示模块双向信号相连接;控制方法通过就地控制模块控制一次破碎站,利用料位实时监测模块、翻煤信号指示模块,捕捉、收集、转化模拟人员观测参数,控制流程可实现一次破碎站无人值守,实时掌握现场各类设备在线参数数据、稳定且有序控制物料倒运过程,排除生产安全隐患,提升人员对一次破碎站的管理运行效率。行效率。行效率。
技术研发人员:佟兴 吴福利 周鹏 党锐锋 王轶非
受保护的技术使用者:新疆天池能源有限责任公司
技术研发日:2022.12.07
技术公布日:2023/5/23
声明:
“露天矿一次破碎站无人值守系统及控制方法与流程” 该技术专利(论文)所有权利归属于技术(论文)所有人。仅供学习研究,如用于商业用途,请联系该技术所有人。
我是此专利(论文)的发明人(作者)
 409
编辑:北方有色网
来源:新疆天池能源有限责任公司
409
编辑:北方有色网
来源:新疆天池能源有限责任公司



 咨询细节
咨询细节








































































 2026年08月06日 ~ 08日
2026年08月06日 ~ 08日 















