全部
▼
热搜:
 1173
1173
 0
0
一种重力触发剪断销信号测量报警元件,涉及一种信号测量技术,了解决现有剪断销信号测量元件触发失效、报警手段单一、故障查找困难的问题。本发明的导体板为盆体结构;电池仓室设置在导体板盆体结构的内部,电池仓室用于安放电池;电池的正极与正极板相连,电池的负极与负极板相连;报警电路用于发出报警信号,报警电路的正极输入端与正极板相连,报警电路的负极与导体板相连;全铜重锤的一端弹性相连在负极板的底面上;全铜重锤的另一端非接触穿过导体板底部后延伸至陶瓷底壳内,由陶瓷底壳的底部对其承载,此时负极板与导体板为断开状态;当陶瓷底壳的底部受到剪切力破碎时,负极板与导体板为导通状态。有益效果为可靠性高报警手段丰富、及时。
 1222
0
1222
0
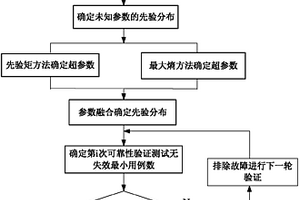
本发明公开了一种基于混合贝叶斯先验分布的可靠性验证测试方法,采用共轭先验分布法确定未知参数的先验分布,通过先验矩方法和最大熵方法分别求出两组不同参数,即得到不同的先验分布,再根据第二类极大似然方法确定以上两种先验分布的权重,按权重将先验矩方法和最大熵方法得出的参数融合,进而得到最终的先验分布比单纯使用其中一种方法得到的先验分布更加准确,与真实的分布拟合度更好。通过最终的贝叶斯先验分布及试验信息,计算出可靠性验证测试中所需的最小无失效用例数,这种方法相对于无先验知识的情况,可以有效的减少测试用例量。
 895
0
895
0
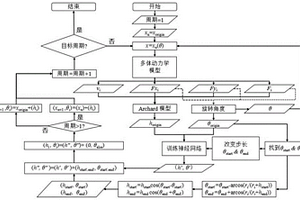
本发明公开了一种基于制造参数的微型断路器动作可靠性预测方法,所述方法如下:1)确定造成产品动作特性退化的关键铰链、失效阈值;2)将孔与轴的初始间隙作为初始制造参数;3)建立多体动力学模型;4)计算第一周期内磨损造成的孔与轴间隙增长量;5)将孔与轴间隙增长量与初始间隙加和作为新的制造参数;6)计算本周期内磨损造成的孔与轴间隙增长量;7)将孔与轴间隙增长量与初始间隙加和作为新的制造参数,记录工作周期内断路器的动作特性退化情况;8)结合阈值计算该批次断路器的动作可靠性。本发明能根据断路器生产过程中所记录的零件制造参数预测产品的动作可靠性,将产品的退化预测与生产过程紧密连接。
 986
0
986
0
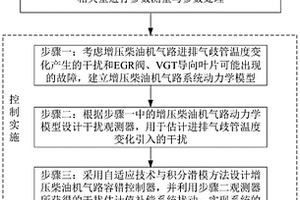
本发明的目的在于提供一种基于观测器的增压柴油机气路抗干扰容错控制方法,包括如下步骤:(1)考虑增压柴油机气路进排气歧管温度变化产生的干扰和EGR阀、VGT导向叶片的故障,建立增压柴油机气路系统动力学模型;(2)根据步骤(1)中的增压柴油机气路系统动力学模型设计干扰观测器,用于估计进排气歧管温度变化引入的干扰;(3)采用自适应技术与积分滑模方法设计增压柴油机气路容错控制器,并利用步骤(2)观测器所获得的干扰估计值补偿系统扰动,实现系统的抗干扰和容错能力。本发明对增压柴油机气路中EGR阀和VGT导向叶片由于长期使用导致的部分失效故障及恒偏差故障有良好的容错能力,并能够即使补偿进排气歧管温度变化所引起的系统干扰。
 1159
0
1159
0
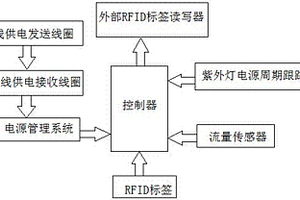
本发明公开了一种基于RFID技术的净水器监测系统,包括控制器,及与控制器电连接的RFID标签、流量传感器和紫外灯电源周期跟踪器;及与控制器电连接的电源管理系统;所述电源管理系统与无线供电接收线圈电连接;所述无线供电接收线圈与无线供电发送线圈通信。本发明的基于RFID技术的净水器监测系统,通过流量传感器测试水流,而另一个跟踪紫外灯的电源周期;RFID读取器定期把这些数据写入过滤器和灯上的标签;等到读写器读取标签时,再将这一信息返回到主控单元;一旦灯或过滤器失效,主控单元会发出声响报警并在一个小的LED显示屏上显示图像。
 1208
0
1208
0
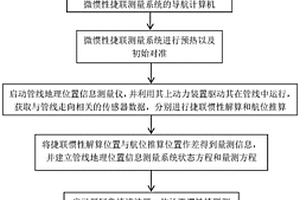
本发明公开了一种基于厚尾鲁棒滤波的管线地理位置信息测量方法,为管线进行地理位置信息测量的技术。具体地说,利用MSINS与里程轮构成惯性/里程轮组合定位系统,通过系统动力装置驱动其在管线中运行获取与管线走向相关的传感器数据,并分别进行捷联惯性解算与航位推算;利用捷联惯性解算位置与航位推算位置差值作为量测信息,并针对里程轮打滑、滑行故障以及管线运动约束条件失效导致出现的位置量测野值信息利用厚尾鲁棒滤波器滤除,同时估计捷联惯性解算误差并校正管线地理位置信息输出,从而使系统提供连续、高精度的管线地理位置信息。
 1037
0
1037
0
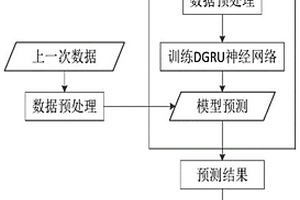
本发明涉及信息技术领域,特别涉及一种防止数据信息丢失的DGRU神经网络及其预测方法。本发明中的DGRU神经网络由输入层、输出层和隐含层组成,隐含层由DGRU神经元构成;所述的DGRU神经元由同一时刻的两个标准GRU单元连接构成;本发明方法包括:获取历史数据集并进行预处理;利用预处理后的数据集训练DGRU神经网络,建立预测模型;获取当前失效数据,进行数据归一化处理后输入预测模型中,得到预测结果三个部分。本发明克服了传统GRU神经网络的缺点,对GRU神经网络进行改进,提出一种能增强模型记忆力,防止信息丢失的DGRU神经网络,并应用DGRU神经网路建立预测模型,与传统GRU神经网络相比,可以提高模型的预测精度。
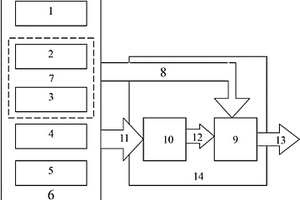
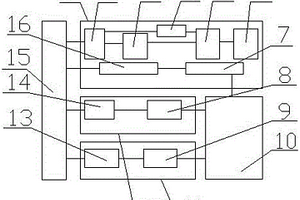
室内飞行智能体惯性系统与激光测距仪组合导航改进方法,其特征在于:传感器部分(6)包括:激光测距仪URG(1),IMU(7),气压高度计(4)和磁场强度传感器(5),陀螺仪(2),加速度计(3);导航信息计算部分(14)包括:USB总线(8),导航计算机(9),转换器件(10),电气连线(11),总线(12),导航信息(13)。使用激光测距仪(1)获取位置信息,惯性导航系统获取姿态信息,采用无迹卡尔曼滤波方法UKF和直线特征提取算法,将位置信息与姿态信息融合在一起,最后通过捷联算法实现航迹推算。本发明可以实现飞行智能体在室内自主导航,有效解决飞行智能体组合导航系统发散问题和航迹推位失效问题,提高了导航精度。
 1081
0
1081
0
一种预测模具型腔数控铣削中颤振的方法,本发明涉及预测模具型腔数控铣削中颤振的方法。本发明的目的是为了解决现有单一刀具路径的铣削稳定性预测方法适用性低,导致铣削颤振预测准确度低,加快刀具失效,影响模具型腔的加工质量的问题。一种预测模具型腔数控铣削中颤振的方法具体过程为:步骤一.建立刀具‑工件系统的相对传递函数;步骤二.将步骤一获得的刀具‑工件系统的相对传递函数引入三维铣削稳定性模型中,得到铣刀铣削颤振频率处的临界轴向切削深度;步骤三、基于步骤二得到的临界轴向切削深度判断模具型腔数控铣削是否发生颤振。本发明用于模具型腔数控铣削领域。
基于米勒平台电压的MOSFET退化评估方法及采用该方法的MOSFET剩余寿命预测方法,涉及半导体退化评估及寿命预测领域。解决了无法实时在线评估MOSFET退化状态的问题,同时满足了对MOSFET的剩余寿命预测方法的需求。基于米勒平台电压的以MOSFET开通波形中的米勒平台电压作为敏感特征参数的评估方法:将MOSFET的米勒平台电压作为评估器件退化状态的参数。采用基于米勒平台电压的MOSFET退化评估方法获得MOSFET退化模型,再利用粒子滤波算法对MOSFET退化模型的参数进行修正与更新,并得到新的MOSFET退化模型,从而获得MOSFET当前状态距失效阈值的时间差,实现对MOSFET的剩余寿命预测。本发明适用于半导体的退化评估及寿命预测。
基于EKF方法和NSDP-AR模型融合型锂离子电池循环寿命预测方法,涉及一种锂离子电池循环寿命预测方法。为了解决目前基于模型的方法对于不同电池及不同工作状态适应能力低和电池容量非线性退化趋势预测能力差的问题,首先,对在线测量待测锂电池的容量数据进行预处理,并离线测量与该待测锂电池同型号的锂电池的真实容量退化数据;其次,基于EKF方法确定锂电池状态空间模型的参数;然后,根据上述建立的锂电池状态空间模型对待测锂电池进行状态估计,利用NSDP-AR模型的输出进行待测锂电池的状态更新,锂电池状态空间模型获取每一个充放电循环的电池容量数据,并将数据与待测锂电池的失效阈值比较获取锂电池剩余寿命;本发明主要应用在电池寿命预测领域。
本发明公开了一种基于退化序列时序关联建模的长寿命锂离子电池早期寿命预测方法及系统,其中,该方法包括:获取n个电池单体的容量退化数据并进行重构,得到训练数据集;建立j个基于序列对序列模型的容量预测模型,并利用所述训练数据集分别训练;将待测电池单体某周期的放电容量作为某训练好的模型的初始输入,得到第一步预测输出结果;再在其输入至这个模型中,得到下一步预测输出结果,迭代执行直至低于失效阈值,将每步预测输出结果首尾相连得到退化过程曲线;并对其他模型进行预测得到j条容量退化曲线,求其容量取均值,得到最终预测结果。该方法解决了现有使用单步迭代预测模式带来的长时预测精度和稳定性不佳的问题。
 795
0
795
0
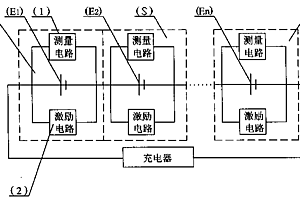
本实用新型公开一种蓄电池内阻的测量装置——蓄电池内阻交流测量装置。它由分别对应于蓄电池组中每个蓄电池(E)的测量单元(S)组成,每个测量单元(S)由测量电路(1)和激励电路(2)组成,测量电路(1)和激励电路(2)分别并联在蓄电池(E)的正负极间,激励电路(2)由开关电路(2-1)、放电电阻(2-2)和控制器(2-3)组成,开关电路(2-1)的一端连接蓄电池(E)的一端,开关电路(2-1)的另一端连接放电电阻(2-2)的一端,放电电阻(2-2)的另一端连接蓄电池(E)的另一端,控制器(2-3)连接在开关电路(2-1)的控制端上。由于本实用新型在每个蓄电池正负极间都并联了测量电路和激励电路,所以克服了蓄电池内阻差异带来的误差,尤其当蓄电池失效后期,对于内阻测量与现有技术相比更准确、可靠。
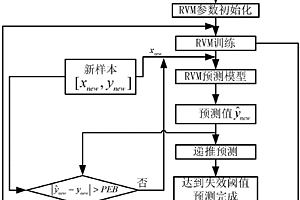
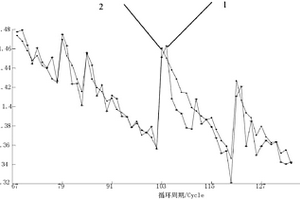
基于相关向量回归的在线预测锂离子电池剩余寿命的方法,属于锂离子电池寿命预测技术领域。它解决了现有锂离子电池采用离线方法预测剩余寿命,预测精度低的问题。它首先选取原始样本,然后进行相空间重构构造训练样本集;再初始化相关向量机RVM模型参数;RVM训练,得到RVM预测模型;得到预测值将与ynew进行比较,若则构造新的训练集WS=WS∪INS,重新训练RVM,更新RVM预测模型;否则保持RVM预测模型不变;进行递推预测,直到预测值小于失效阈值U时预测完成,从而实现待预测锂离子电池剩余寿命的在线预测。本发明适用于锂离子电池剩余寿命的预测。
 904
0
904
0
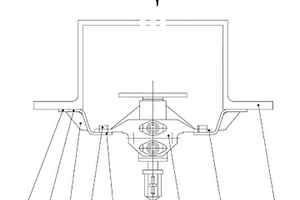
本实用新型提供了一种防脱型测重机构安装座,包括:“Z”字型的吊板,筋板和挡块;吊板包括固定端和安装端,吊板的固定端与铁路货车中梁固接;吊板的安装端用于对铁路货车测重机构的安装边进行托挂,吊板的安装端上设置有与铁路货车测重机构安装边上的螺栓安装孔相对应的通孔,并通过紧固件将铁路货车测重机构与测重机构安装座进行紧固连接;筋板位于吊板的下表面;吊板的安装端的上平面还固接有挡块,挡块能够嵌入铁路货车测重机构的安装边上的减重孔,对测重机构在水平方向定位。由于吊板上挡块对测重机构的定位作用,解决了测重机构在紧固件失效情况下由于车身震动容易脱落,丧失测重功能及造成安全隐患的问题。
 1177
0
1177
0
一种基于GPR带有不确定区间的锂离子电池循环寿命间接预测方法,本发明涉及一种电池寿命预测方法。本发明解决了现有方法无法实现锂电池循环寿命预测的问题,本发明采用ESN算法,进行退化建模,采用高斯过程回归的建模方法,建立基于GPR的等压降放电时间预测模型进行基于ESN的退化模型训练与基于GPR的等压降放电时间预测模型训练,获得等压降放电时间预测模型,进行基于GPR的等压降放电时间预测模型,获得等压降放电时间的预测值;进行基于ESN的退化模型,获得下N1个放电周期的电池的放电容量;电池的剩余容量值与电池容量的失效阈值行比较,完成电池循环寿命的间接预测。本发明适用于电池寿命预测。
 826
0
826
0
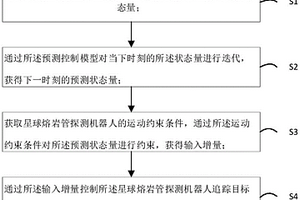
本发明涉及星球探测技术领域,具体而言,涉及一种星球熔岩管探测机器人的控制方法。该星球熔岩管探测机器人的控制方法包括:获取预测控制模型和星球熔岩管探测机器人在当下时刻的状态量;通过预测控制模型对当下时刻的状态量进行迭代,获得下一时刻的预测状态量;获取星球熔岩管探测机器人的运动约束条件,通过运动约束条件对预测状态量进行约束,获得输入增量;通过输入增量控制星球熔岩管探测机器人追踪目标轨迹。由此,通过运动约束条件对预测状态量进行约束获得输入增量,使输入增量可以约束于安全范围内,避免产生运动失效的情况,从而增加了对星球熔岩管探测机器人的控制稳定性。
 874
0
874
0
一种基于热声效应的核反应堆非能动测温装置,它涉及一种核反应堆非能动测温装置。本发明为了解决堆芯温度中目前仅测量冷却剂温度,热电偶等仪表用于燃料棒温度测量时存在工程难度,导致核反应堆正常运行时燃料棒温度无法直接测量,以及由于热电偶等是不具有完全意义的非能动特性的测量元件,这类测量装置在极端及缺电时可能会失效从而可靠性不高,不利于事故下燃料棒温度的直接监测的问题。本发明热声管的上部为热端部,热声管的下部为冷端部,冷端封口密封安装在热声管的冷端部,热声管的热端部内壁上开设承装槽,板叠无缝隙固定在承装槽内,热声管的热端部与核燃料棒之间通过固定件连接。本发明用于核反应堆核燃料棒测温。
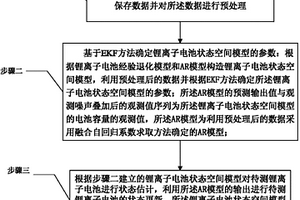
基于EKF方法和AR模型融合型锂离子电池循环寿命预测方法,涉及一种锂离子电池循环寿命预测方法。为了解决目前的这些基于模型的方法存在对于不同电池及不同工作状态适应能力低的问题。它包括:一、在线测量待测锂电池的容量数据,保存数据并对所述数据进行预处理;二、基于EKF方法确定锂离子电池状态空间模型的参数;三、根据建立的锂离子电池状态空间模型对待测锂离子电池进行状态估计,利用所述AR模型的输出进行待测锂离子电池的状态更新,所述锂离子电池状态空间模型获取每一个充放电循环的电池容量数据,并将所述数据与待测锂离子电池的失效阈值比较获取锂离子电池剩余寿命。它用于预测锂离子电池循环寿命。
 1204
0
1204
0
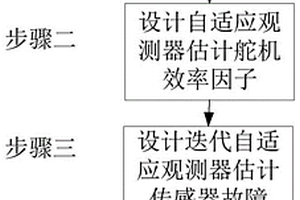
本发明涉及一种基于迭代自适应观测器的无人舰艇故障估计方法,属于无人舰艇控制技术领域;包括通过坐标变换将同时含有舵机失效、传感器故障的无人水面艇模型分解为两个子系统,其中子系统1只含有舵机故障,子系统2只含有传感器故障;针对子系统1,设计自适应故障观测器估计舵机效率因子;针对子系统2,设计迭代自适应故障观测器估计传感器故障;建立子系统1与子系统2的误差方程,判断误差系统的稳定性。本发明可实现对无人艇系统故障情况的准确估计,并给出故障发生的时间、发展的过程以及故障的严重程度等信息,便于操作中心对于无人艇安全性的监控;本发明还可对无人艇的舵机失效情况与传感器故障同时进行估计,减低了容错设计的成本。
 1199
0
1199
0
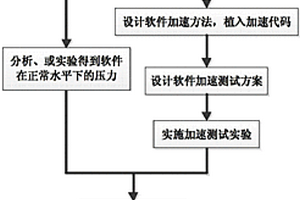
本发明涉及的是软件性能测试领域,具体涉及一种利用加速生命测试理论对产生老化现象的软件进行寿命测试的软件加速生命测试方法。软件加速生命测试方法包括:添加注入内存故障的代码;设置加速水平的压力值N为4,8,12,16,运行程序;记录失效时间TTF,保存数据;估计软件寿命的样本分布,建立合适的寿命和压力之间的关系,估计非加速情况下被测试系统的平均失效时间的分布。本发明部署和实施针对发生老化现象的软件的加速生命测试,通过耗时较短的加速生命测试得到加速情况下软件的寿命数据,计算非加速情况下软件的真实寿命,在更短的时间内,得到软件正常使用情况下寿命的概率分布。
 1202
0
1202
0
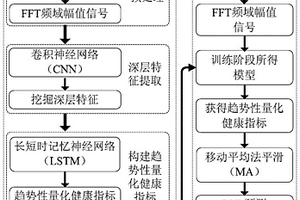
一种基于CNN和LSTM的滚动轴承剩余使用寿命预测方法,涉及滚动轴承寿命预测领域。针对滚动轴承存在性能退化渐变故障和突发故障两种模式下其剩余使用寿命(RUL)预测困难的问题,该方法首先对滚动轴承原始振动信号作FFT变换,然后将预处理所得到的频域幅值信号进行归一化处理后,并将其作为CNN的输入。利用CNN自动提取数据局部抽象信息以挖掘深层特征,避免传统特征提取方法过于依赖专家经验的问题。之后再将深层特征输入到LSTM网络中,构建趋势性量化健康指标,同时确定失效阈值。最后,运用移动平均法进行平滑处理,消除局部振荡,再利用多项式曲线拟合,预测未来失效时刻,实现滚动轴承RUL预测。预测结果能够较好地接近真实寿命值。
 1092
0
1092
0
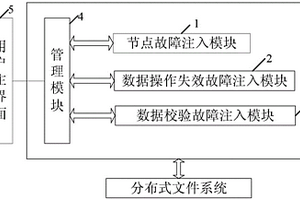
云环境下分布式文件系统可靠性测试套件,涉及云计算领域。本发明是为了解决现有的分布式系统中缺少对分布式文件系统可靠性测试的套件,不能对分布式系统中出现的问题提前做准备,使得系统可靠性低的问题。本发明所述的管理模块用于根据测试人员的操作命令调用相应的节点故障注入模块、数据操作失效故障注入模块和数据效验故障注入模块,并收集节点故障注入模块、数据操作失效故障注入模块和数据效验故障注入模块的故障注入结果通过用户主界面反馈给测试人员,用户主界面用于处在测试人员和管理模块之间,提供人机交互界面、接收使用者命令和反馈故障注入结果。它可用于云环境下分布式文件系统的故障注入。
 1201
0
1201
0
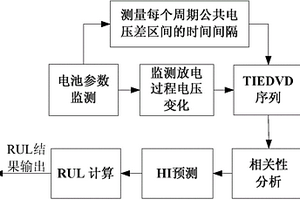
基于概率集成的锂离子电池剩余寿命间接预测方法,涉及锂离子电池剩余寿命预测技术领域。它为了解决在线工作条件下锂离子电池容量不可测量、以及传统MONESN方法的不稳定性的问题。本发明首先构建健康因子HI;根据HI构建HI相关性模型GLRM;利用GLRM估计HI失效阈值;利用失效阈值进行锂离子电池剩余寿命预测;对预测结果进行不确定性表达。本发明克服绝大部分锂离子电池剩余寿命预测依赖最大容量的限制,并解决了构建的HI的失效阈值作为寿命终止的判断条件难以确定的问题,有效克服传统MONESN方法的不稳定性的问题。同时,能够实现不确定性的表达和管理。本发明适用于容量不可测时锂离子电池剩余寿命的预测。
 1080
0
1080
0
本发明是一种基于梯度特征的冰壶球自动测速方法。本发明属于冰壶球自动测速技术领域,本发明获取冰壶比赛视频,判定冰壶是否运动;根据前掷线的形状生成模板图像,提取模板图像的梯度信息,根据梯度信息确定模板图像中心在某一帧图像上的坐标;根据模板图像中心在某一帧图像上的坐标,确定冰壶球通过前掷线时的速度。本发明在通过自动检测冰壶球在前掷线处的速度,为冰壶机器人进行精确落点提供技术支持。在综合考虑了实际的计算精度与运算速度后,提出一种基于梯度特征的冰壶球自动测速方法,解决了因摄像头视角不同、场地背景复杂以及冰面反光而导致的绝大多数特征匹配算法失效的问题,为冰壶机器人将冰壶球精确投掷到大本营中心提供支持。
本发明公开了一种适用于卫星互联网场景下基于链路误码率预测的混合接触图路由方法,结合卫星互联网中星间链路特点以及接触图路由算法中存在的问题,提出基于接触失效检测的动态接触图路由算法DCGR‑CFD,提升接触计划的准确性,提高投递成功率,但DCGR‑CFD算法在星间链路的信道质量较差的环境下投递成功率仍较低,因此,在DCGR‑CFD算法基础上针对路径选择所存在问题提出本发明,对信道质量较好的卫星节点采取基于误码率的CGR‑DSR改进算法,仅对星间链路受到较强的信号干扰的卫星节点采用多副本传输的Prophet算法,不仅提高了数据包投递成功率,还能有效控制了备份数据包的数目,降低网络拥塞的发生概率。
 985
0
985
0
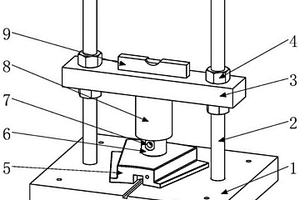
本发明涉及一种核主泵推力轴承推力瓦高压止逆阀的压力测试工艺,从推力瓦出油孔送入高压油压迫装在推力瓦中的止逆阀,通过观察推力瓦进油孔的高压油泄露情况来确定推力瓦及止逆阀组件的止逆性能,底板(1)、M30螺杆(2)、压板(3)、M30六角螺母(4)、推力瓦(5)、连接件(6)、液压千斤顶(8)、聚氨酯橡胶平垫(10)、止逆阀(11)、内六角螺塞(12)、密封环(13)、密封胶(14)、螺纹锁固密封剂(15)按照图纸装配完成。本发明可以准确的测试推力瓦及止逆阀组件的止逆性能,解决了因核电站常规核检修反复拆卸、回装止逆阀,可能导致止逆阀性能失效但无法检测的问题。
 769
0
769
0
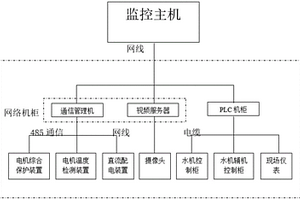
本实用新型是一种水机安全监测系统。所述系统包括:监控主机、通信管理机、视频服务器、PLC机柜、电机综合保护装置、电机温度检测装置、直流配电装置、摄像头、水机控制柜、水机辅机控制柜和现场仪表。电机温度检测装置可对水泵机组的轴承温度、机封失效进水、电机温度等参数进行实时采集,本实用新型对现地、泵站监控层、远程调度三级控制,实现水机运行的有效管理,为水机运行安全提供保障;本实用新型的监控主机可实现优化数据存储结构,数据存储与查询,实时及历史数据库进行统一管理。
 1123
0
1123
0
本发明涉及动态轨迹的精密预测领域,具体涉及一种固定航线任务下的移动对象动态轨迹预测方法。离线状态下,定义带有位置标签的轨迹偏差序列,构建基于轨迹偏差序列的二维容器序列,将相同航线任务下的移动对象历史轨迹偏差数据存储在二维容器序列中;在线状态下,在二维容器序列中检索预测对象的前向已知轨迹偏差序列,得到样本集;采用在线ISO算法利用样本集,基于RBF神经网络结构在线建立得到移动对象的轨迹偏差预测模型;利用移动对象的轨迹偏差预测模型预测移动对象未来的轨迹;重复步骤二、三,直至完成任务。本发明能够解决现有离线获得的移动对象轨迹预测模型在环境发生动态变化时失效的问题,同时提高轨迹预测精度。
中冶有色为您提供最新的黑龙江有色金属理论与应用信息,涵盖发明专利、权利要求、说明书、技术领域、背景技术、实用新型内容及具体实施方式等有色技术内容。打造最具专业性的有色金属技术理论与应用平台!



































































 2025年09月25日 ~ 27日
2025年09月25日 ~ 27日 













